The document provides an overview of the root locus method in control systems, explaining how to construct root loci to visualize changes in closed-loop pole locations as a system parameter varies. It discusses the importance of angle and magnitude conditions, the tedious nature of calculating roots for higher-order systems, and outlines a systematic approach to construct root loci plots. Key steps include identifying open-loop poles and zeros, determining real-axis segments of the root locus, and calculating breakaway points and asymptotes.





































![Solution
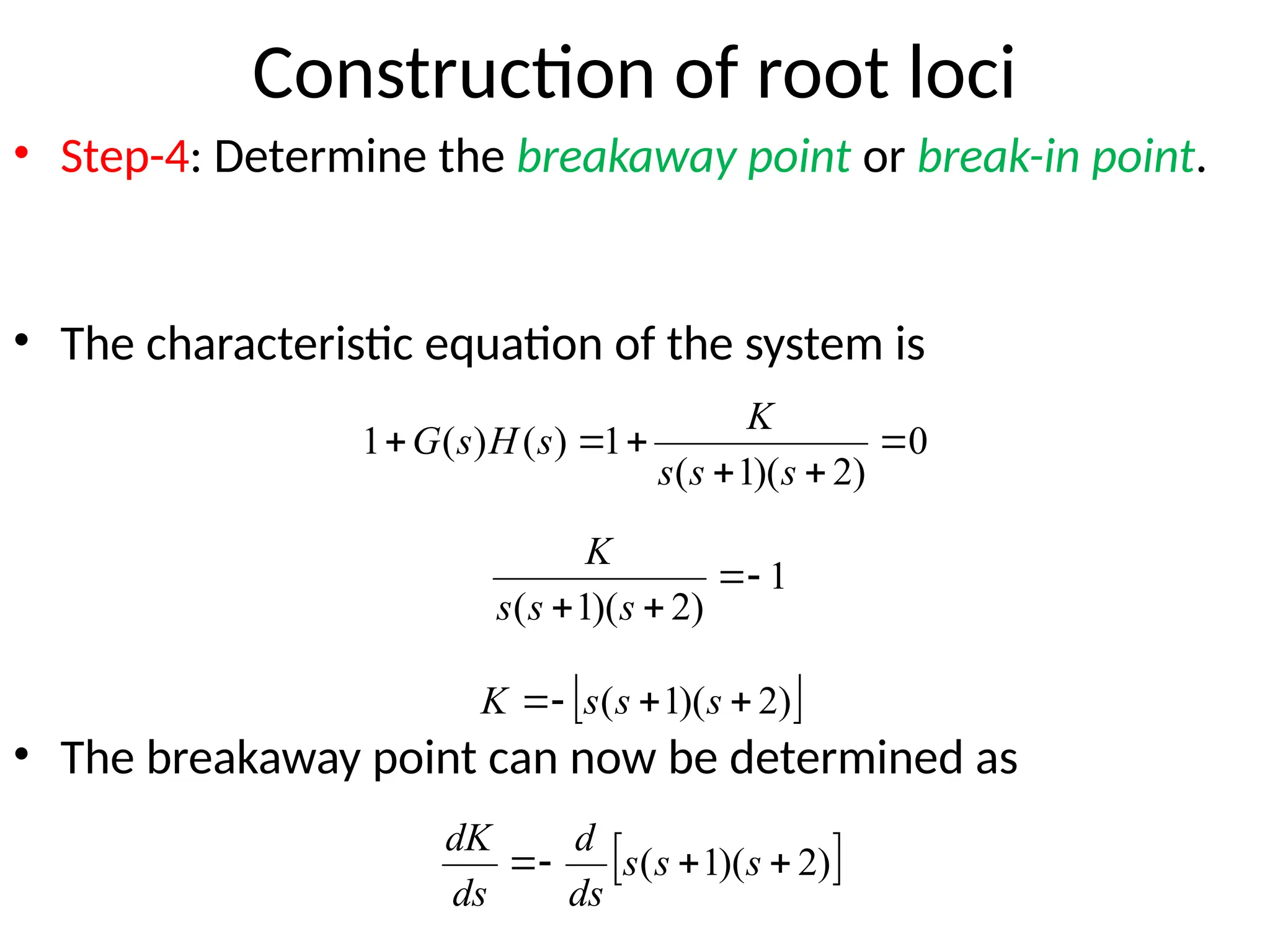
• Differentiating K with respect to s and setting the derivative equal to zero yields;
Hence, solving for s, we find the
break-away and break-in points s = -1.45 and 3.82
1
2
3
)
15
8
(
2
2
s
s
s
s
K
)
15
8
(
)
2
3
(
2
2
s
s
s
s
K
0
)
15
8
(
)]
8
2
)(
2
3
(
)
3
2
)(
15
8
[(
2
2
2
2
s
s
s
s
s
s
s
s
ds
dK
0
61
26
11 2
s
s
180
0
0
180
0
)
2
(
)
1
(
)
5
(
)
3
(
,
82
.
3
540
0
180
180
180
)
2
(
)
1
(
)
5
(
)
3
(
,
45
.
1
s
s
s
s
s
s
s
s
s
s](https://image.slidesharecdn.com/rootlocus-240918082209-3cec77b5/75/Root-Locus-ppt-x-construction-of-root-locii-39-2048.jpg)