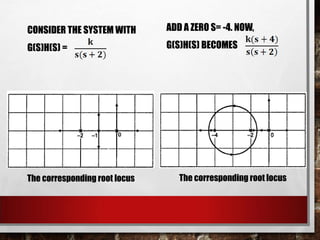
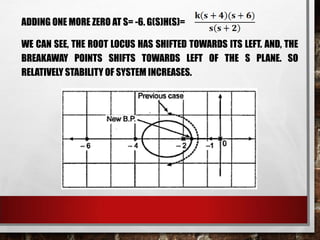
This document discusses poles and zeros and their effect on system stability. It states that poles are the roots of the denominator of a transfer function, while zeros are the roots of the numerator. The addition of poles generally shifts the root locus to the right, lowering stability by delaying response and making the system more oscillatory. The addition of zeros shifts the root locus left, improving stability by speeding up response time. In conclusion, poles and zeros determine the stability and behavior of a system.











































![Roth_herwitz_stability_criterion-[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rothherwitzstabilitycriterion1-251026051926-6a7e967e-thumbnail.jpg?width=640&height=640&fit=bounds)






































