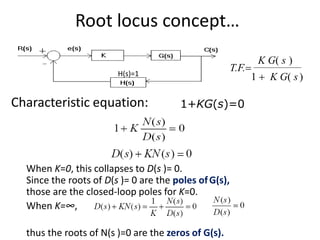
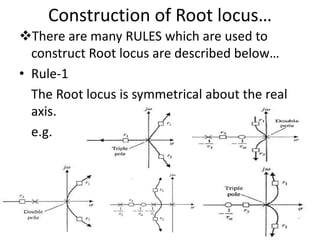
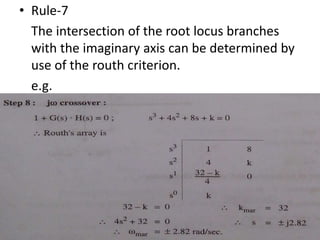
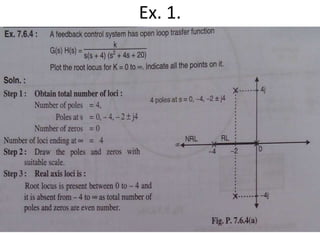
This document summarizes the key rules and concepts for constructing root locus diagrams. It lists the names and student IDs of 5 group members working on a control systems engineering project. The document then explains that the root locus shows how the roots of the characteristic equation change in the s-plane as the system parameter K varies from 0 to infinity, and can be used to analyze a system's stability and transient response. It proceeds to describe 8 rules for constructing root loci, including rules about the locus originating from open-loop poles, terminating at open-loop zeros or infinity, determining breakaway points, and calculating the angle of departure.