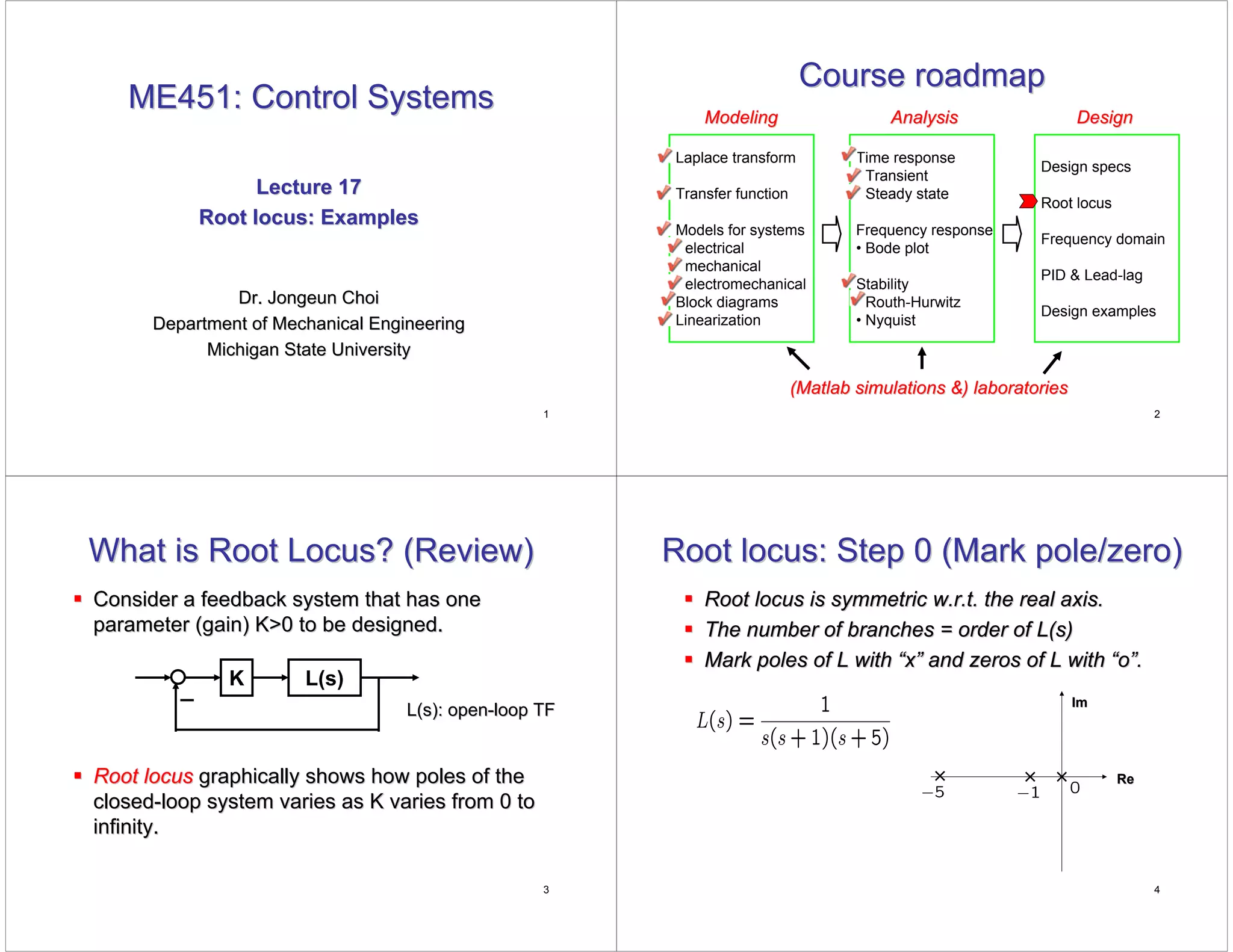
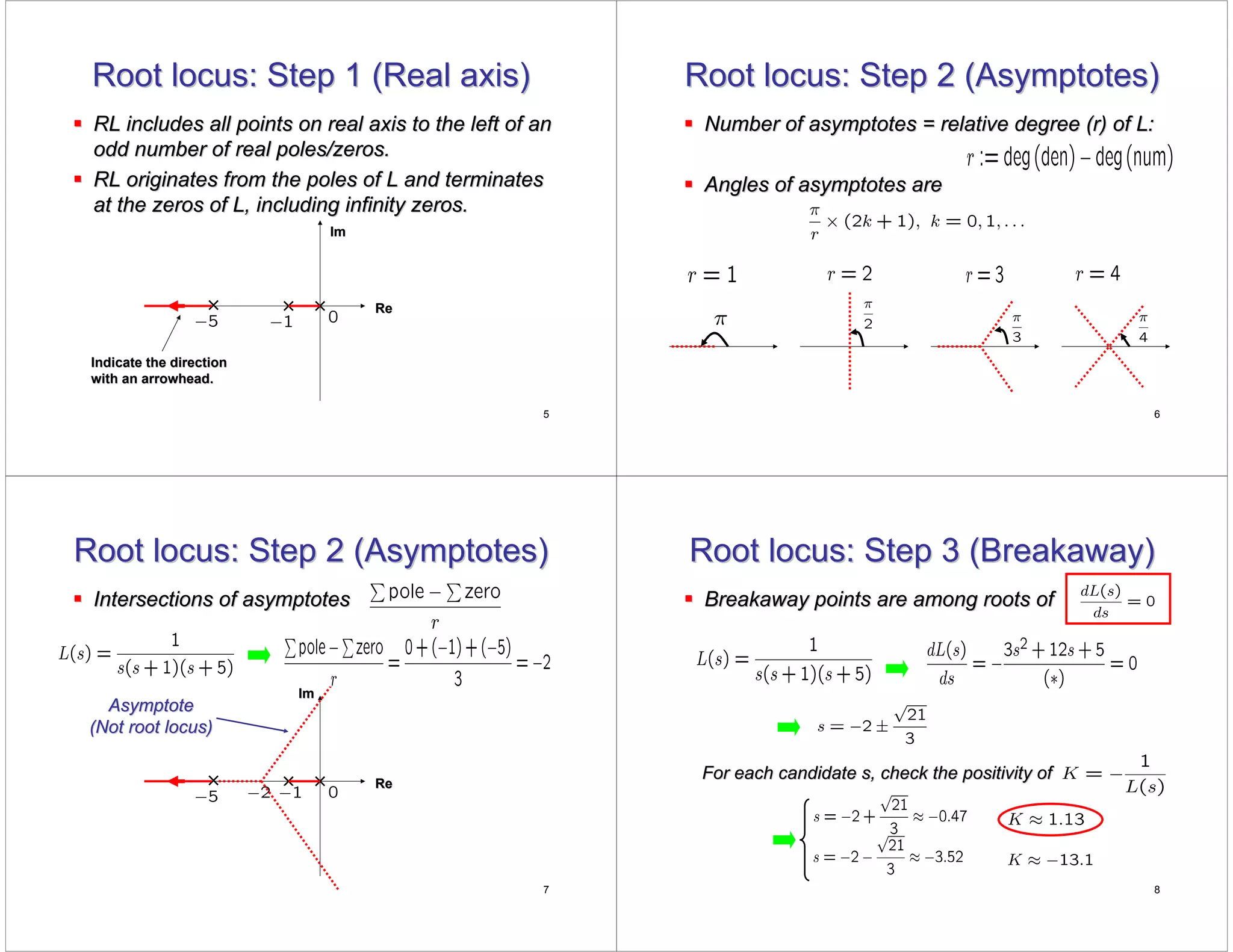
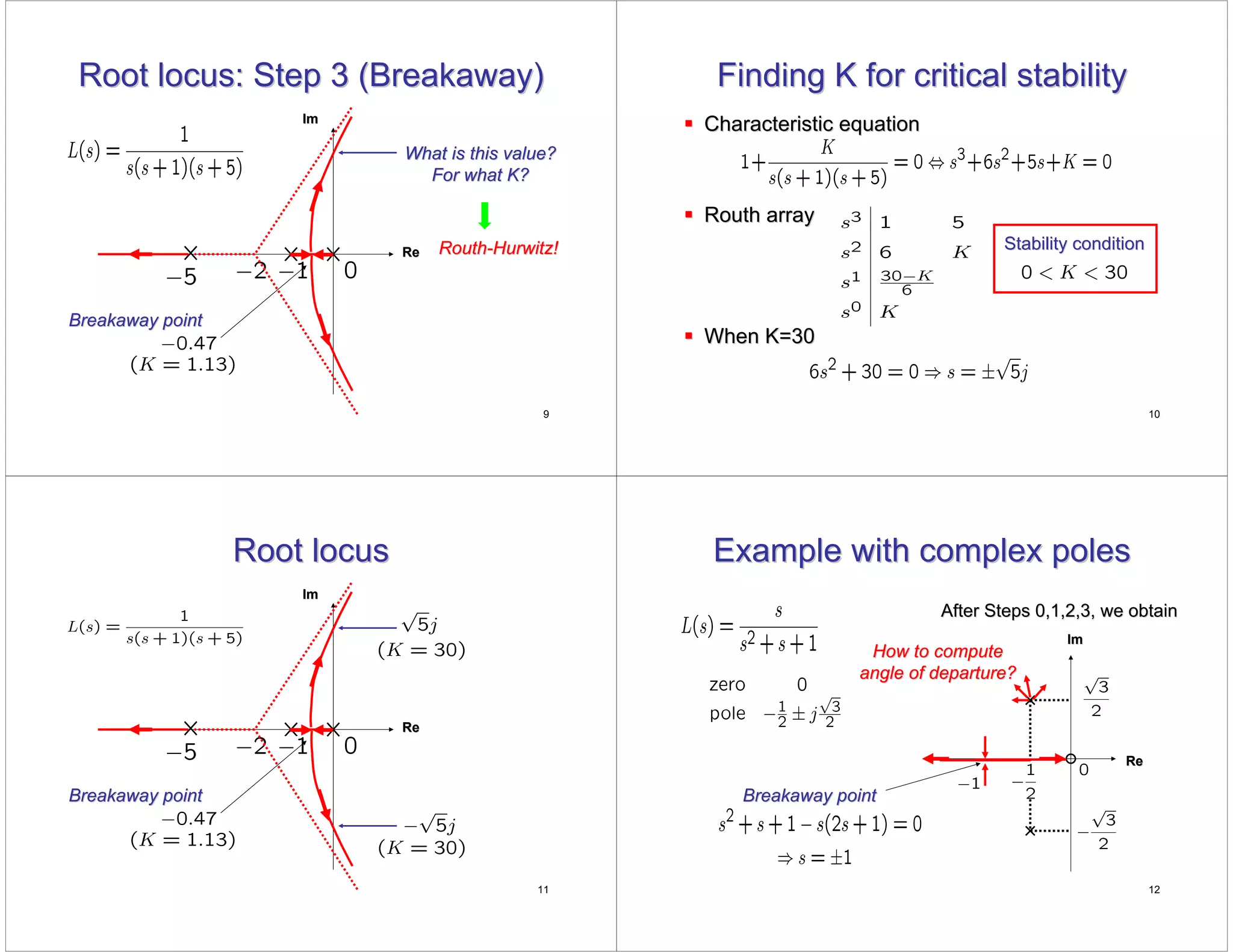
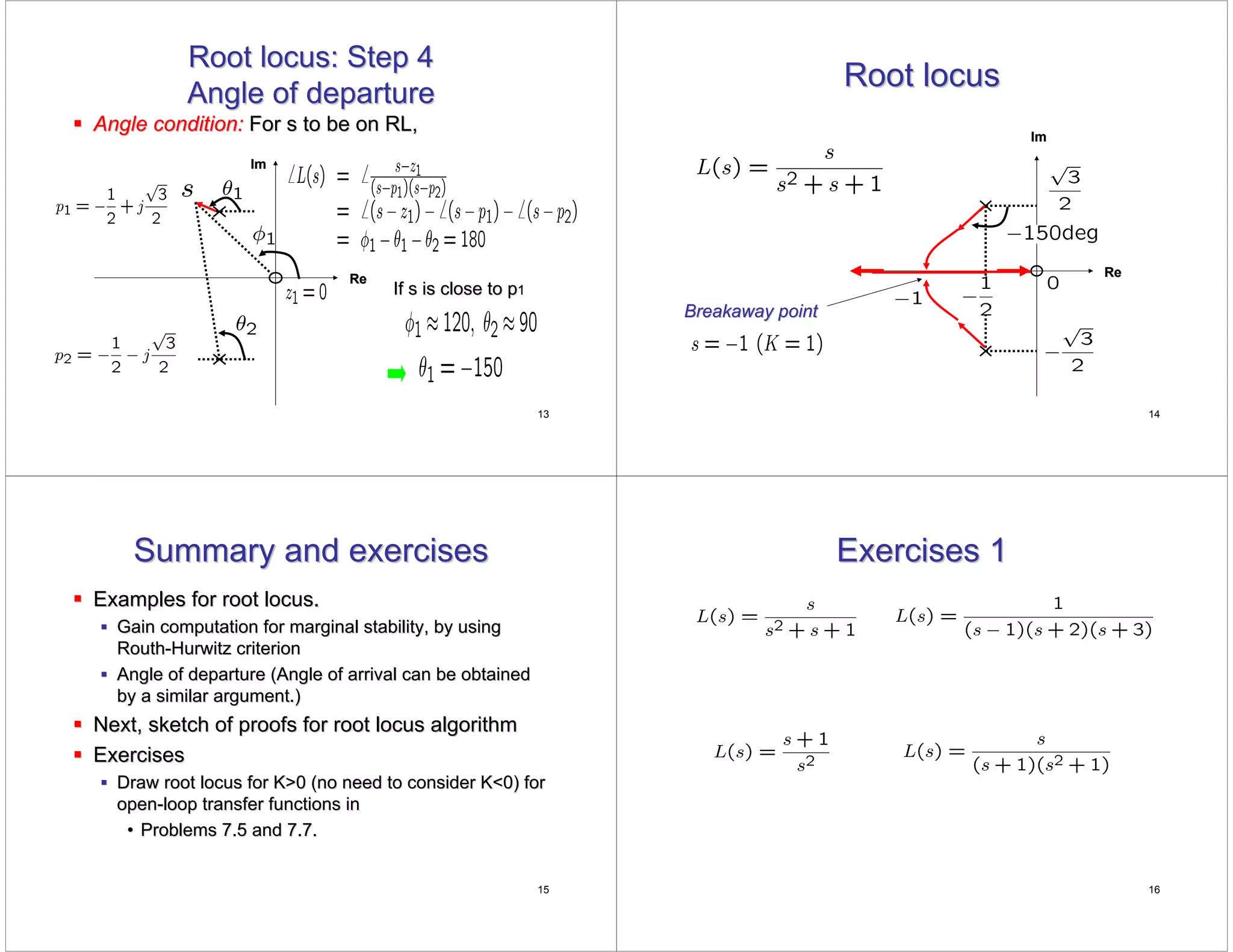
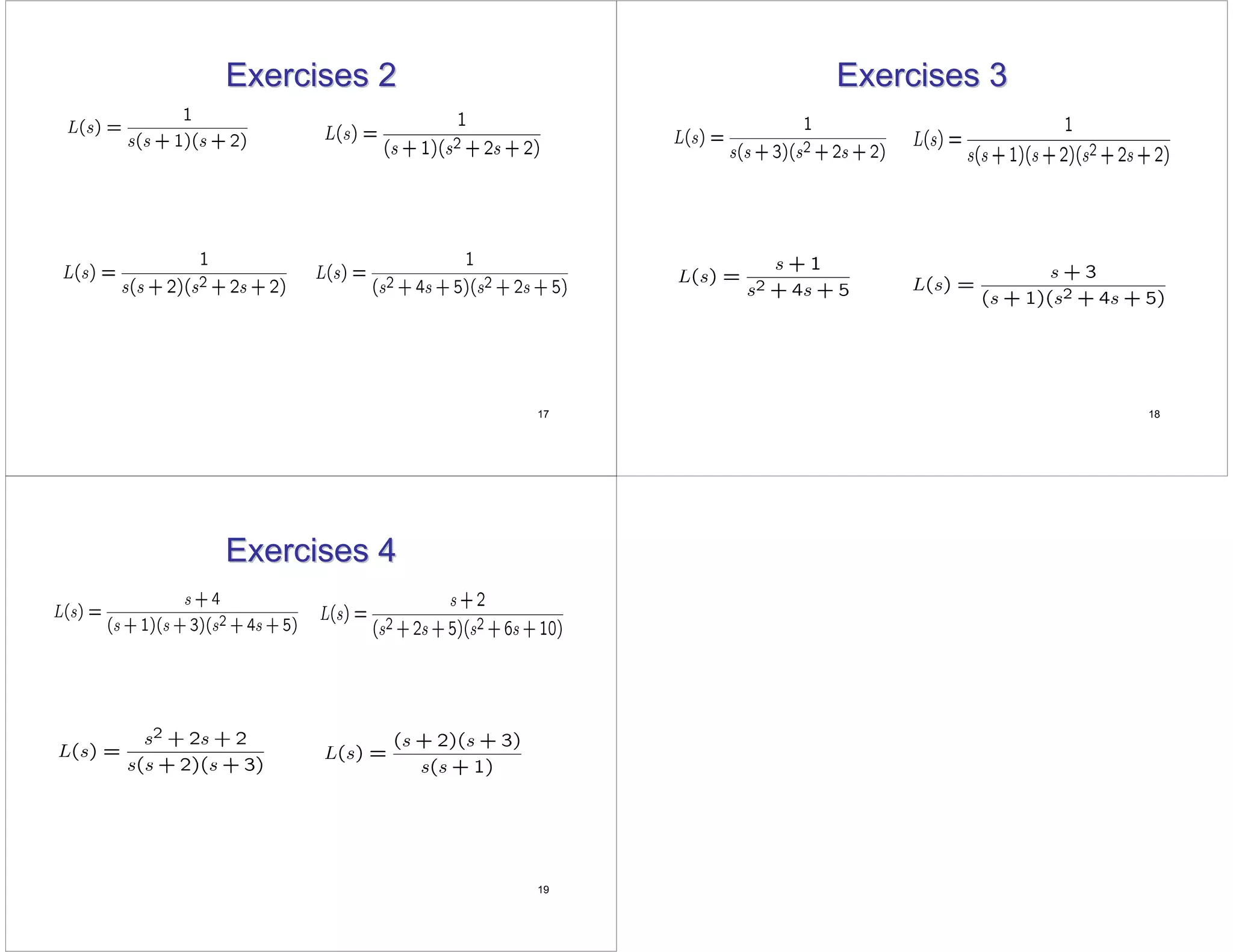
This document discusses root locus analysis, which graphically shows how the poles of a closed-loop system vary with changing gain. It provides examples to demonstrate the steps for sketching root loci, including marking poles and zeros, determining the real axis path and asymptotes, finding breakaway points, and calculating the angle of departure from a complex pole. The document also computes the critical gain for marginal stability using the Routh-Hurwitz criterion and provides exercises for students to practice drawing additional root loci.