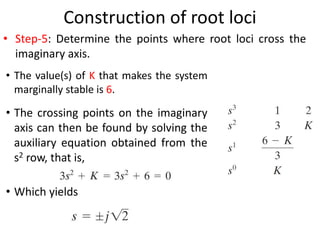
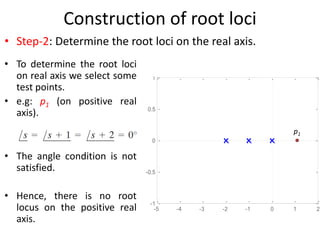
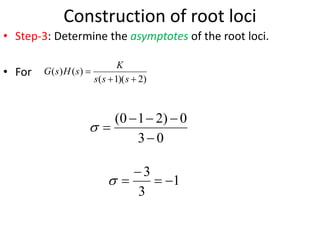
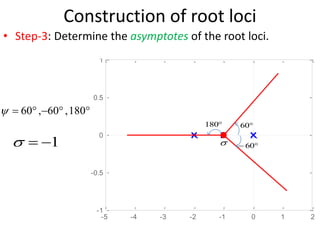
The document outlines the steps for constructing root loci in control systems, detailing methods to locate poles and zeros in the s-plane, determine asymptotes, breakaway and break-in points, and identify points crossing the imaginary axis. It provides examples of calculating the required parameters for unity feedback systems and illustrates various techniques such as the Routh stability criterion. Additionally, it includes several homework problems to reinforce the concepts discussed.















![Solution
• Differentiating K with respect to s and setting the derivative equal to zero yields;
Hence, solving for s, we find the
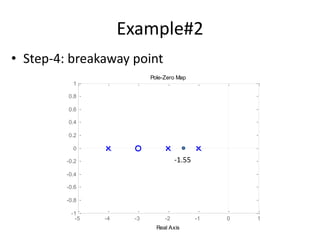
break-away and break-in points; s = -1.45 and 3.82
1
2
3
)
15
8
(
2
2
s
s
s
s
K
)
15
8
(
)
2
3
(
2
2
s
s
s
s
K
0
)
15
8
(
)]
8
2
)(
2
3
(
)
3
2
)(
15
8
[(
2
2
2
2
s
s
s
s
s
s
s
s
ds
dK
0
61
26
11 2
s
s](https://image.slidesharecdn.com/lecture23-24constructionofrootloci-240708110114-fe4eb888/85/construction_of_root_loci_-Hussian-Lectures-23-320.jpg)