Downloaded 30 times
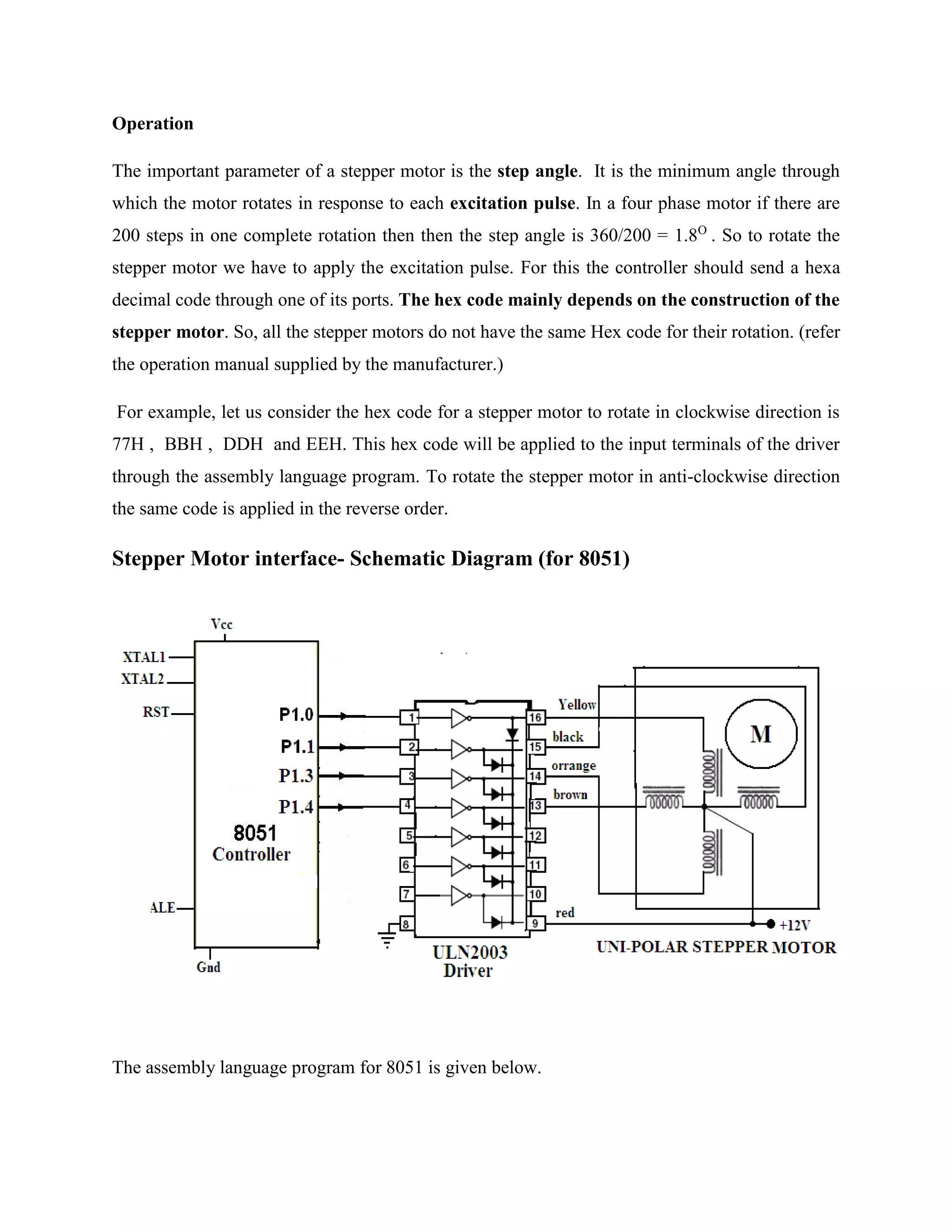
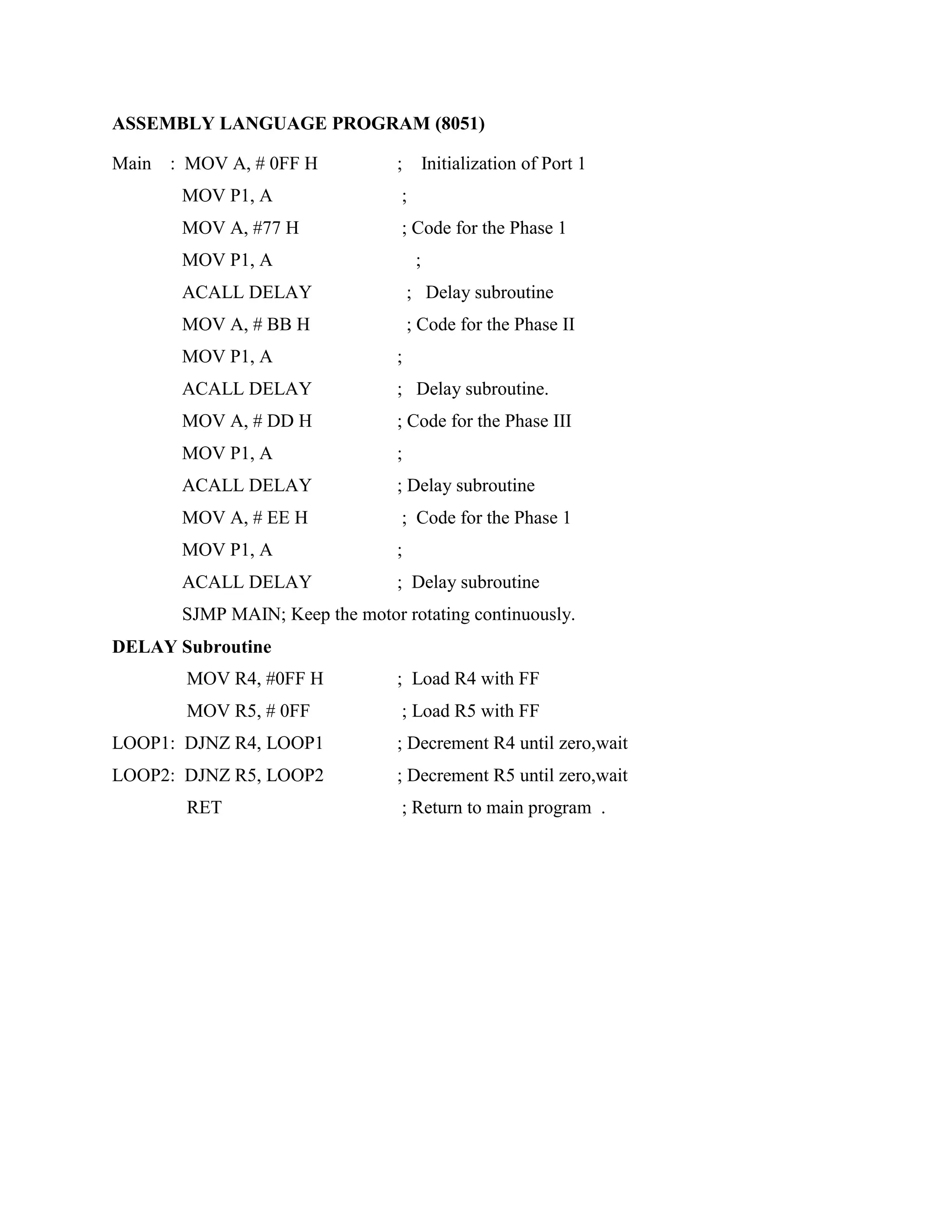
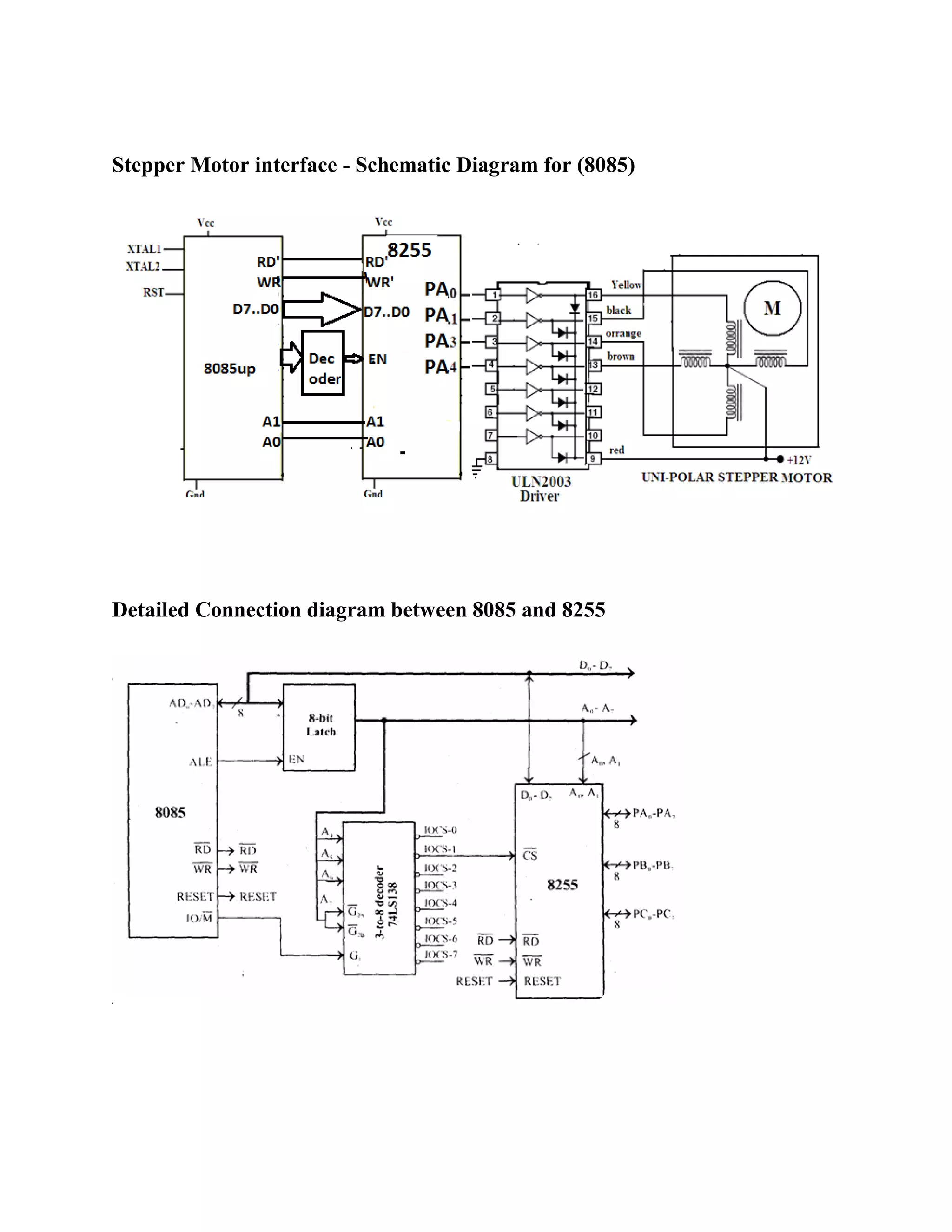
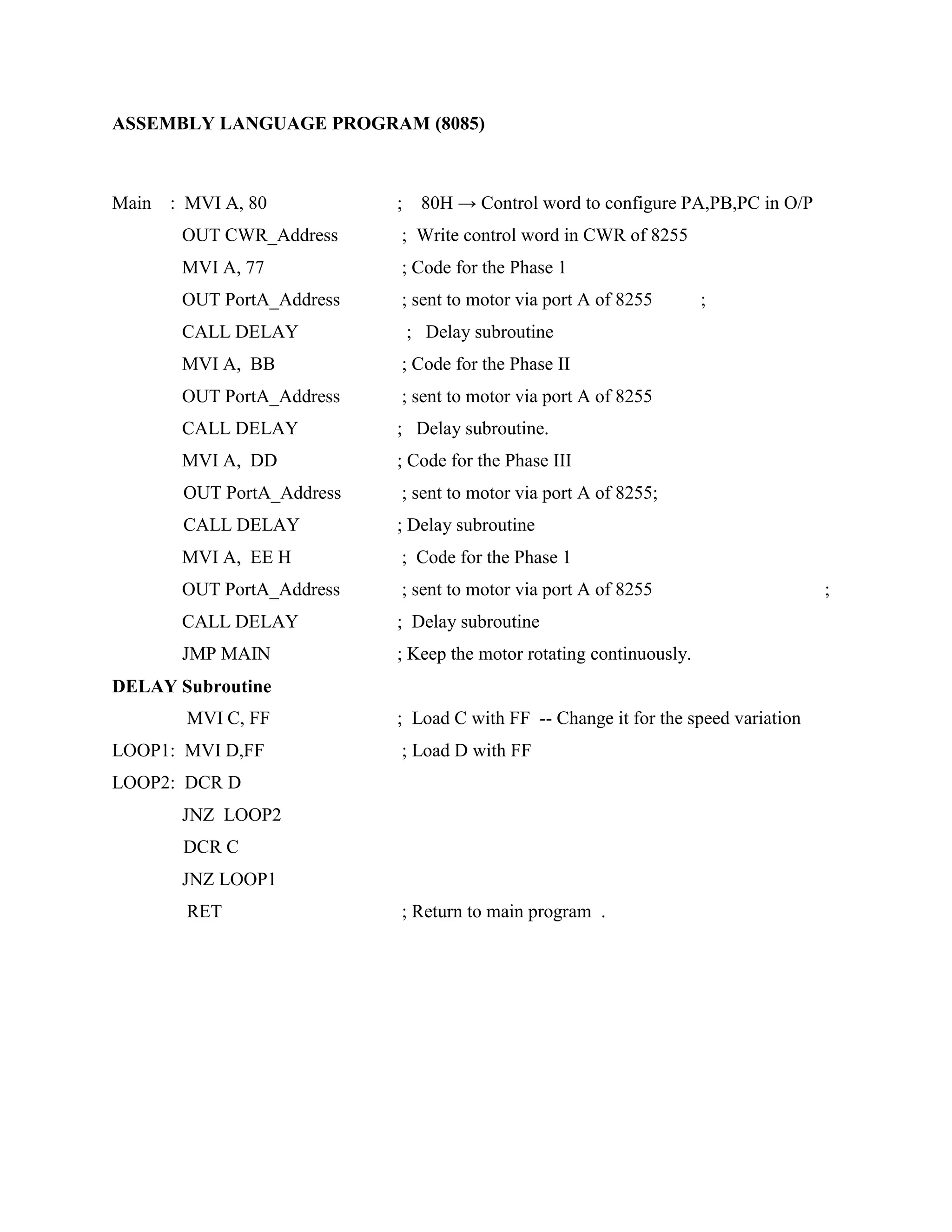

This document discusses interfacing and controlling a stepper motor using microcontrollers like the 8085 and 8051. It describes the basic structure of a stepper motor and explains that it rotates in fixed steps in response to electrical pulses. An interface is needed because stepper motors require more current than microcontrollers can provide. The document proposes using a ULN2003 motor driver IC to interface the stepper motor safely. It provides example assembly language code to send the necessary hexadecimal codes to rotate the stepper motor clockwise or counterclockwise using ports on the 8051 and 8255 I/O chips connected to an 8085 microcontroller.