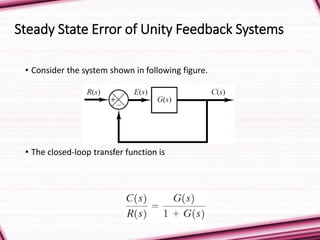
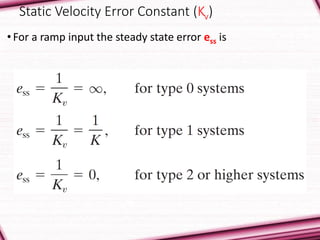
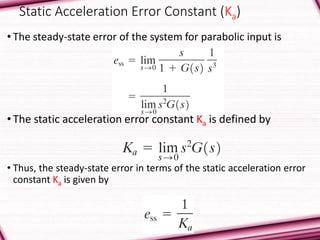
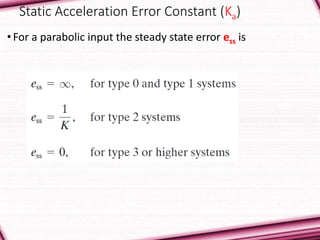
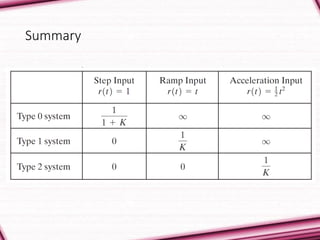
This document discusses steady state error in control systems. It defines steady state error as the difference between the input and output of a system at infinite time. The type of a control system, from Type 0 to higher, determines its steady state error for different input types like steps, ramps, and parabolas. Higher type systems have lower steady state error but reduced stability. The document also introduces static error constants that quantify steady state error for different input types, like position (Kp) for steps, velocity (Kv) for ramps, and acceleration (Ka) for parabolas. These constants are used to calculate the expected steady state error for a given system and input.