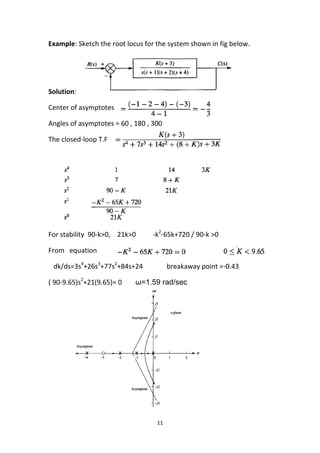
1. Root locus analysis graphically displays the location of closed-loop poles as a function of the open-loop gain K.
2. Root loci start at open-loop poles when K=0 and end at open-loop zeros or infinity as K approaches infinity. There are an equal number of loci and system order.
3. Breakaway points occur where loci depart or arrive at the real axis between poles or zeros. These may be complex.




































![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















