Downloaded 51 times
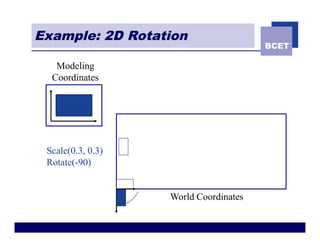
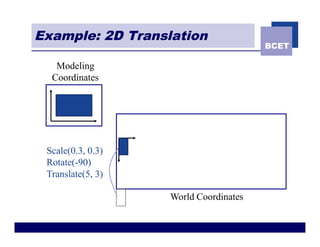

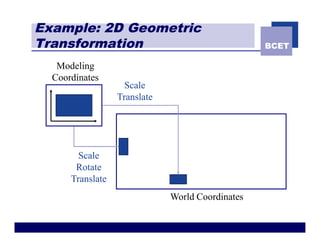
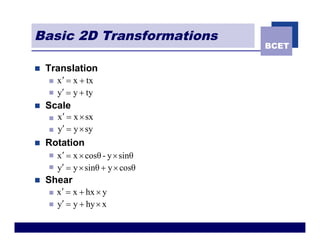
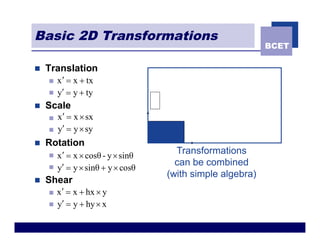
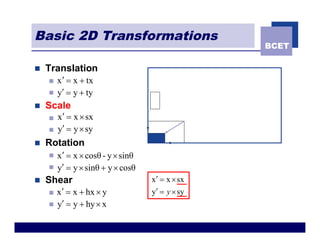
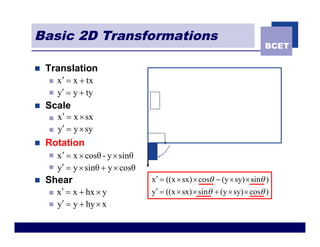
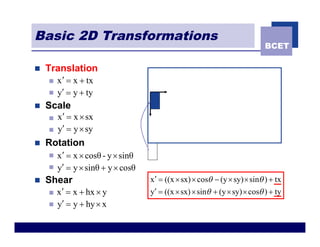
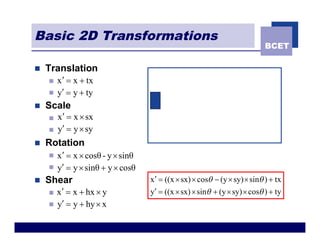
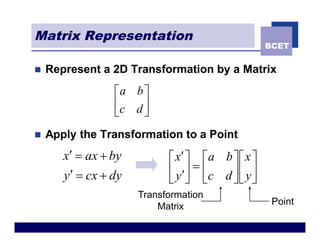
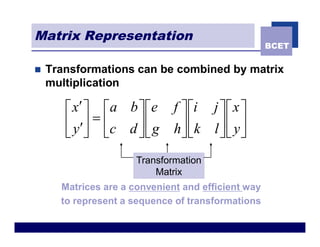
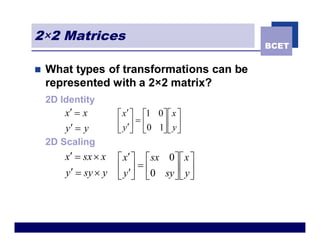
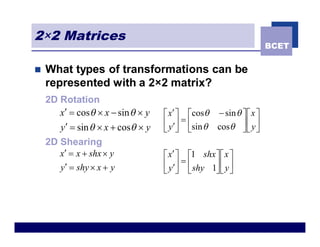
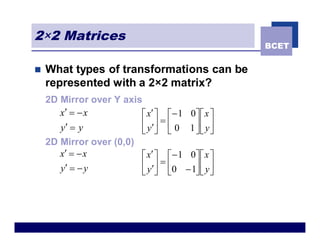
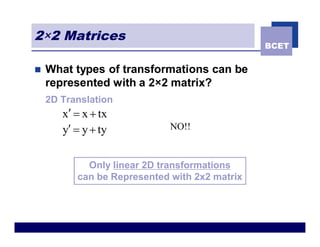
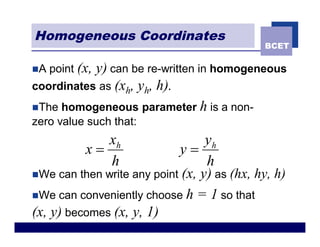
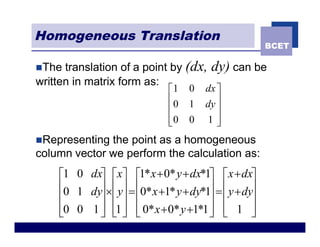
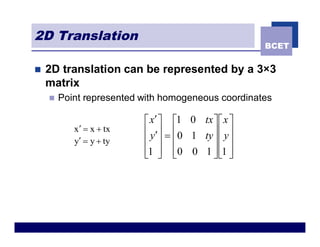
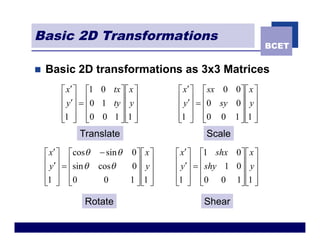
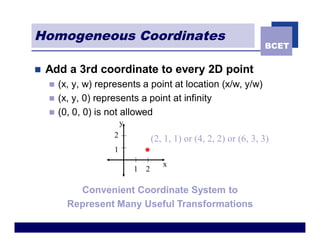
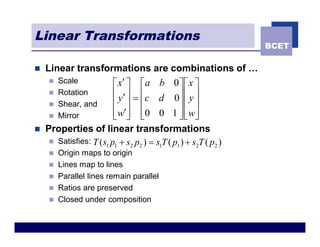
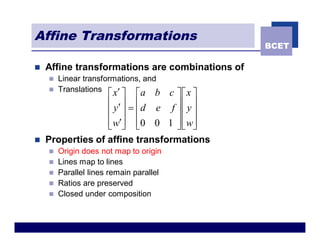
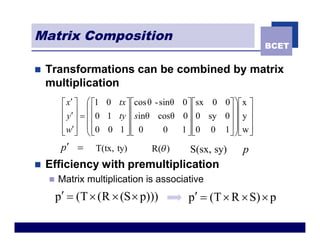
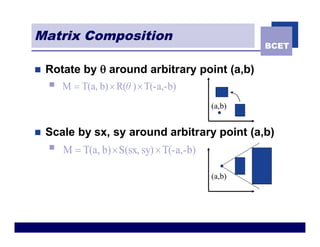
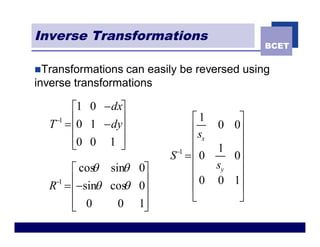
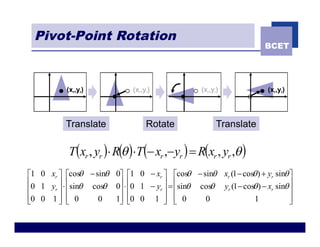
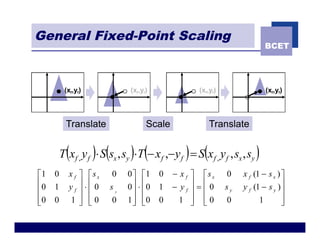
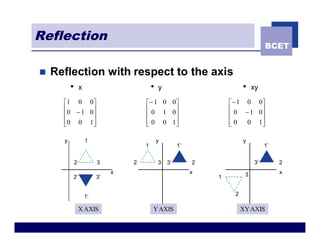
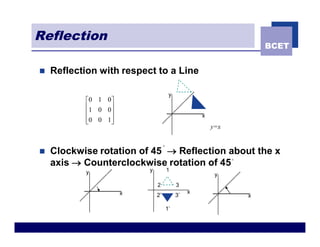
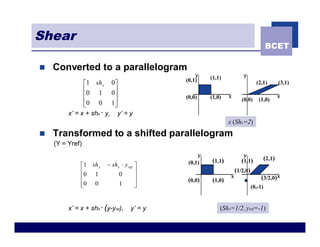
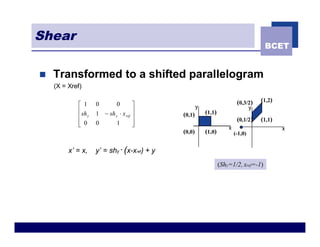

The document discusses 2D geometric transformations including translation, rotation, scaling, and shearing. It introduces representing transformations using 2x2 matrices and homogeneous coordinates using 3x3 matrices. Transformations can be combined by matrix multiplication, allowing multiple transformations to be applied sequentially in an efficient manner.






























![[Android] 2D Graphics](https://cdn.slidesharecdn.com/ss_thumbnails/trainingandroidlesson12-130304083929-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)