Downloaded 20 times

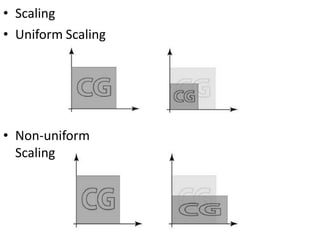
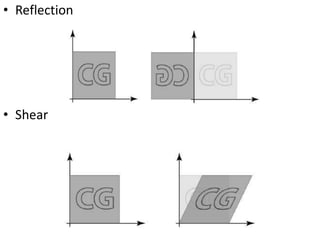

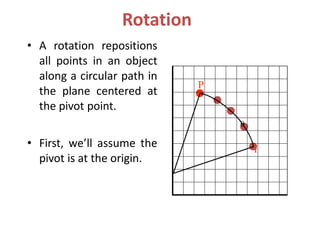
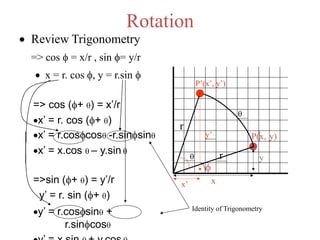
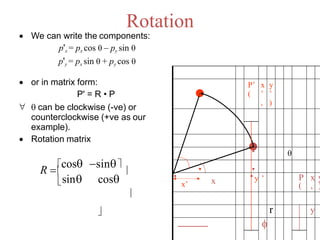
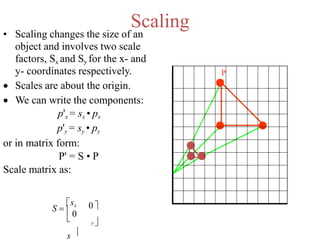
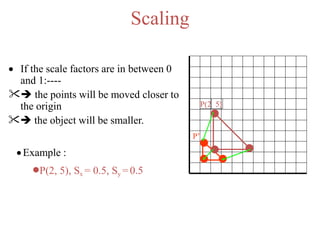
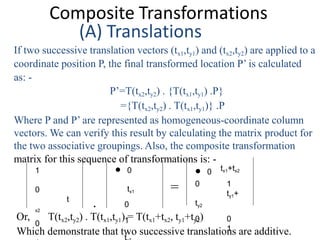
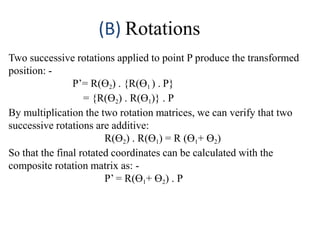
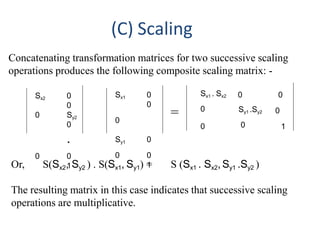
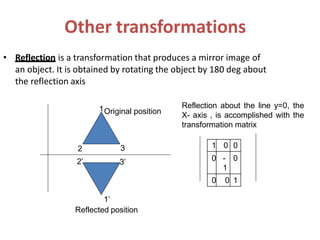
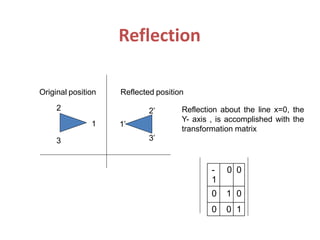
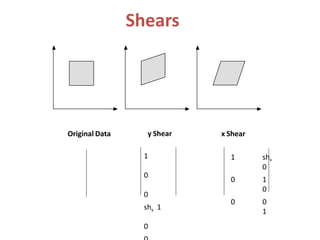


The document discusses 2D transformations in computer graphics, emphasizing operations like translation, rotation, scaling, reflection, and shear. It explains how these transformations change an object's position, orientation, or size without needing to redraw the object, detailing mathematical formulations and matrices for each transformation type. A concluding note highlights the necessity of these transformations for effective object manipulation.