Download as PDF, PPTX


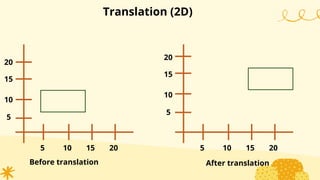
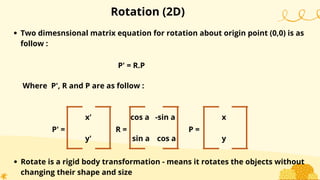

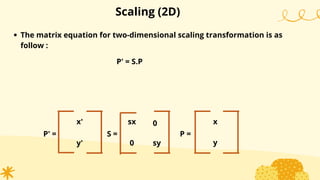
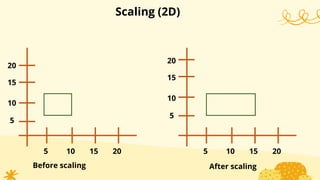
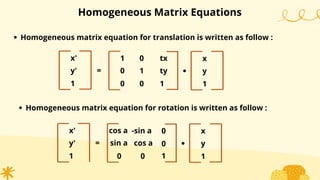
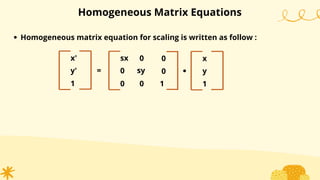
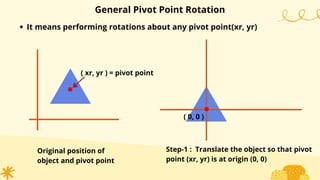
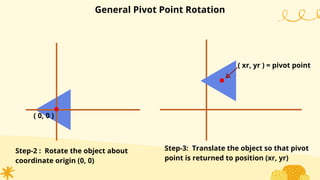
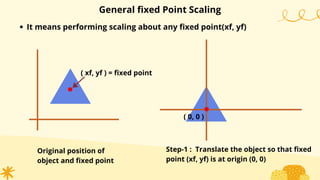
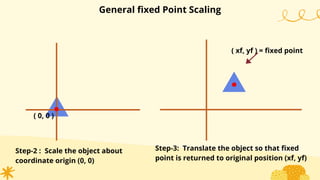
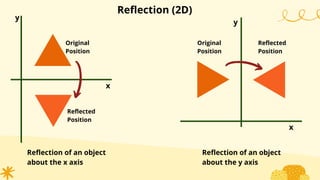
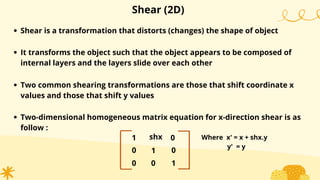
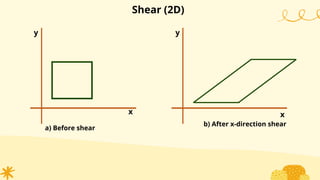
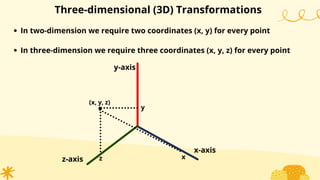
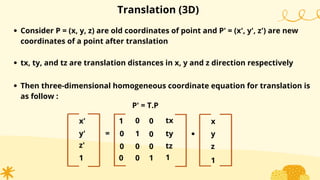
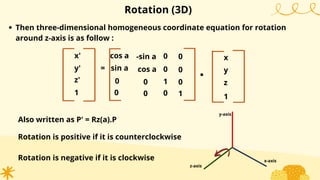
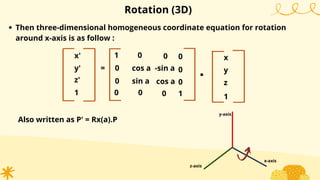
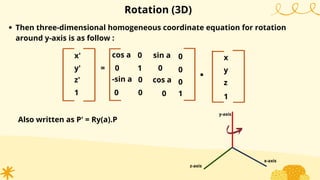
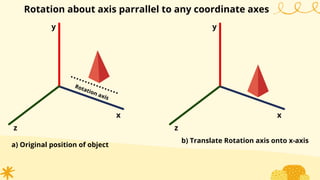
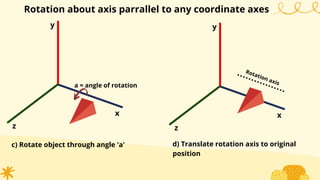
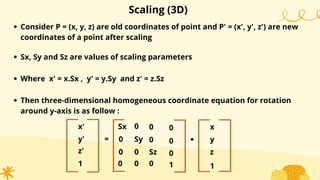
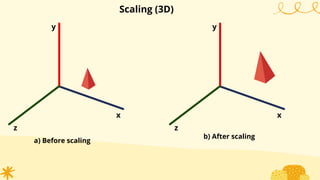
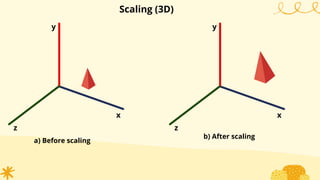
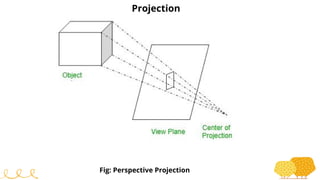





This document provides an overview of transformations in computer graphics. It discusses various 2D and 3D transformations including translation, rotation, scaling, reflection, shear, and their applications. Transformation means changing the orientation, shape, and size of objects or images. Basic 2D transformations discussed are translation, rotation, scaling, reflection, and shear. Homogeneous coordinates and matrix representations are used to combine multiple transformations. The document also discusses general pivot point rotation, fixed point scaling, and 3D transformations.