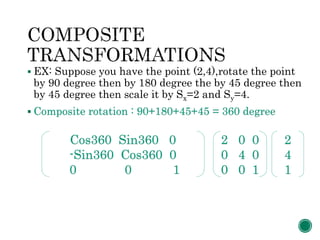
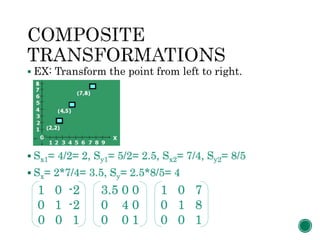
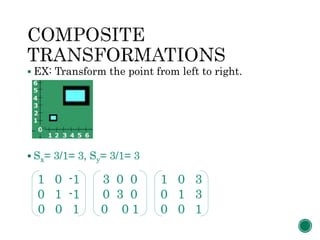
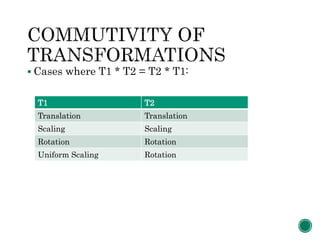
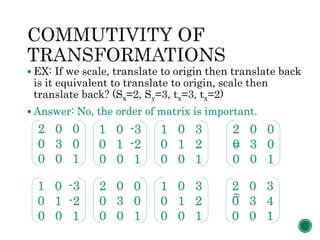
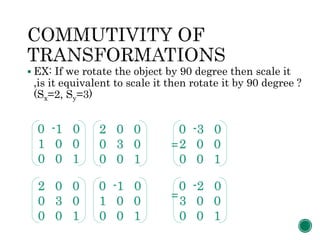
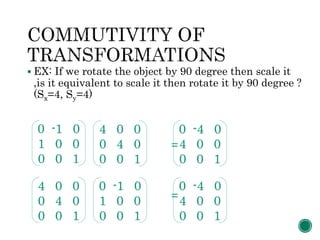
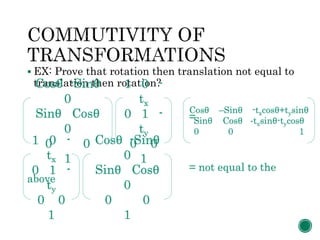
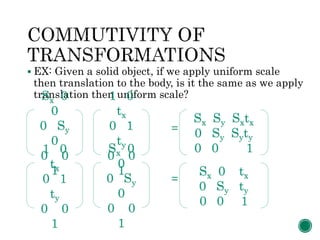
The document discusses 2D geometric transformations using matrices. It defines a general transformation equation [B] = [T] [A] where [T] is the transformation matrix and [A] and [B] are the input and output point matrices. It then explains various transformation matrices for scaling, reflection, rotation and translation. It also discusses representing transformations in homogeneous coordinates using 3x3 matrices. Finally, it provides examples of applying multiple transformations and conditions when the order of transformations can be changed.
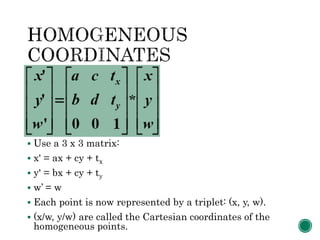
![ 2 x 1 matrix:
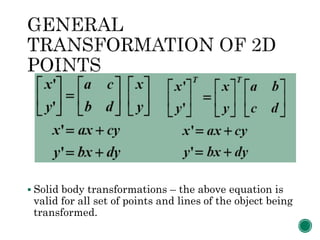
General Problem: [B] = [T] [A]
[T] represents a generic operator to be applied to the
points in A. T is the geometric transformation matrix.
If A & T are known, the transformed points are obtained
by calculating B.](https://image.slidesharecdn.com/chapter03-170331152536/85/Computer-Graphic-Transformations-in-2D-2-320.jpg)
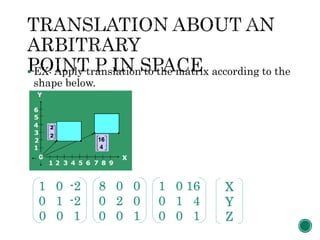
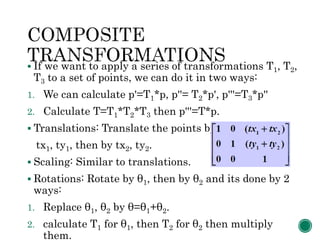
![ B = A + Td , where Td = [tx ty]T.
x’= x + tx , y’= y + ty.
Where else are translations introduced?
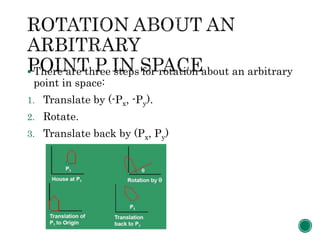
1. Rotations - when objects are not centered at the
origin.
2. Scaling - when objects/lines are not centered at the
origin. if line intersects the origin then no
translation.
Note: we cannot directly represent translations as
matrix multiplication, as we know so far.
We can represent translations in our general
transformation by using homogeneous coordinates.](https://image.slidesharecdn.com/chapter03-170331152536/85/Computer-Graphic-Transformations-in-2D-14-320.jpg)
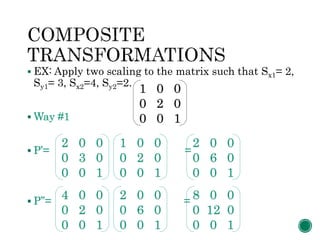
![ General Purpose 2D transformations in homogeneous
coordinate representation:
Parameters involved in scaling, rotation, reflection
and shear are: a, b, c, d.
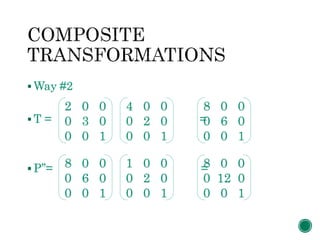
For translation:
If [B]=[T][A] then p,q are
translation Parameter.
if [B]=[A][T] then m,n are
translation parameter.](https://image.slidesharecdn.com/chapter03-170331152536/85/Computer-Graphic-Transformations-in-2D-18-320.jpg)