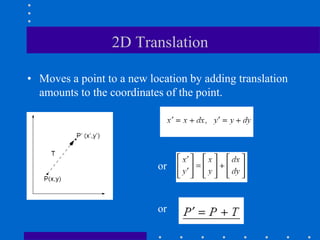
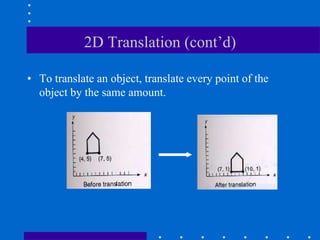
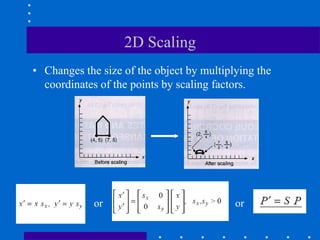
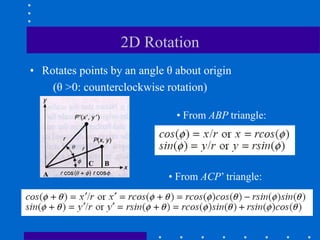
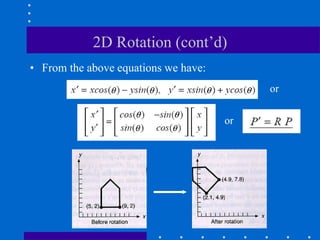
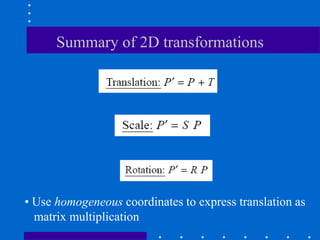
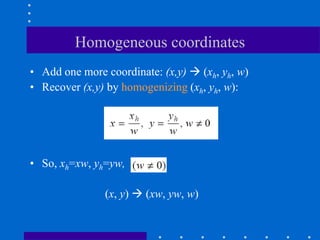
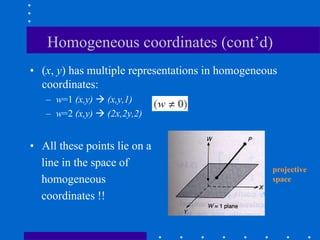
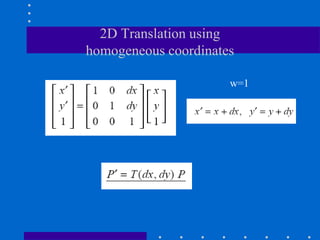
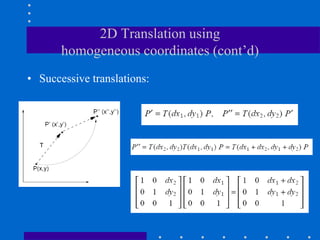
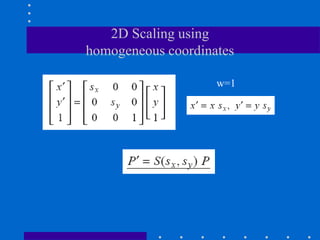
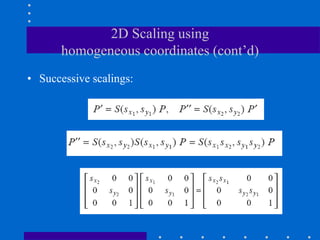
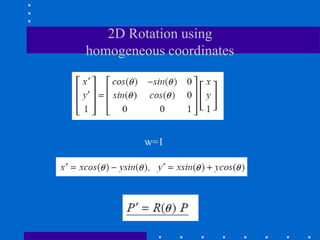
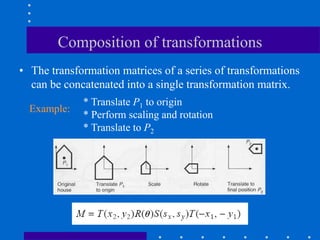
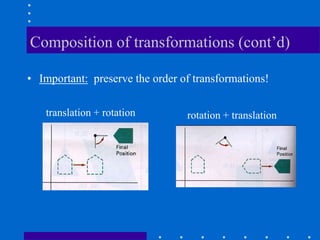
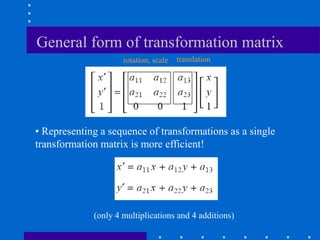
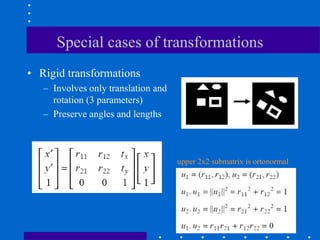
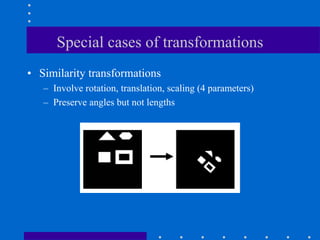
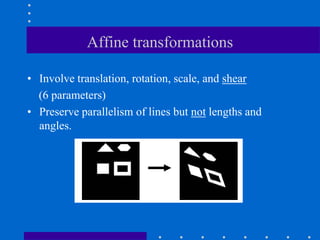
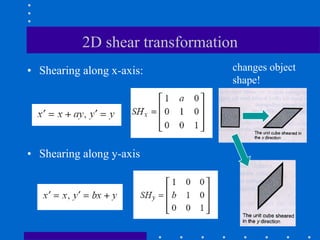
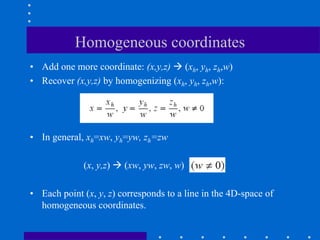
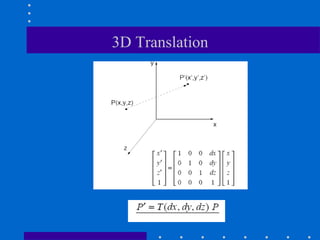
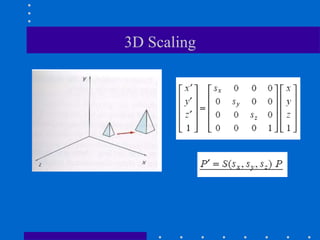
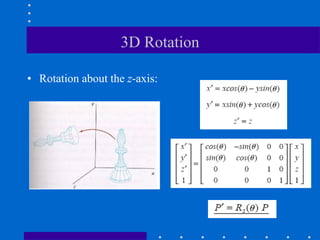
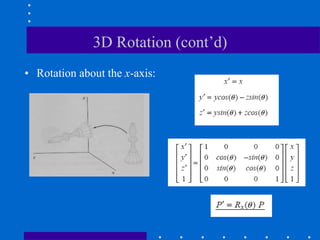
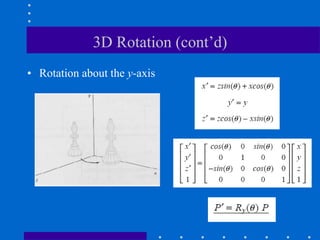
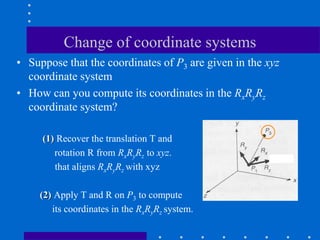
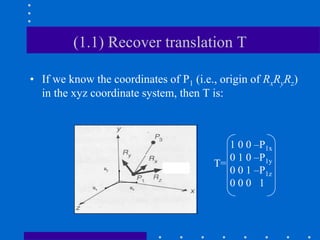
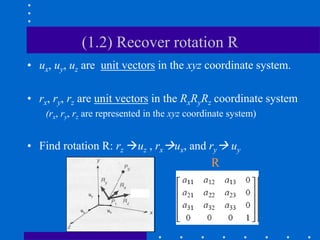
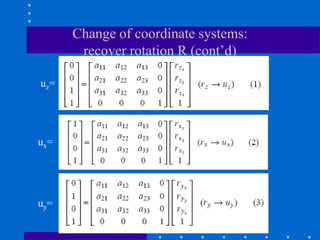
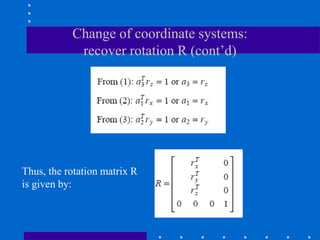
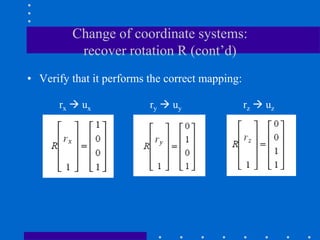
This document discusses 2D and 3D geometric transformations including translation, scaling, rotation, and homogeneous coordinates. It provides equations for representing these transformations using matrix multiplication in homogeneous coordinates. Transformations can be composed into a single transformation matrix by multiplying the individual matrices. The document also discusses recovering the translation and rotation needed to change between two coordinate systems.