Downloaded 316 times
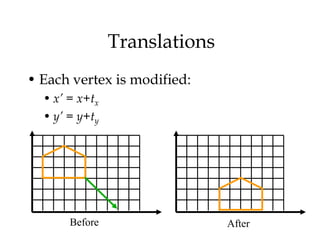
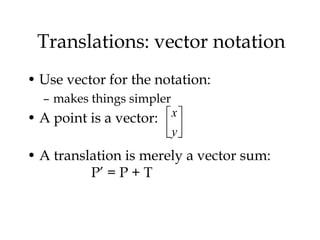
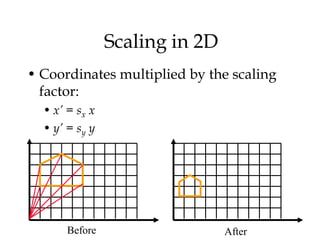
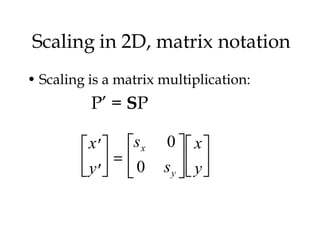
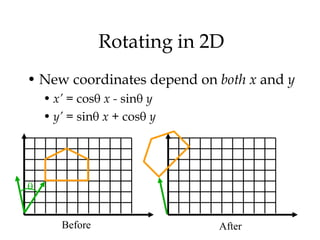
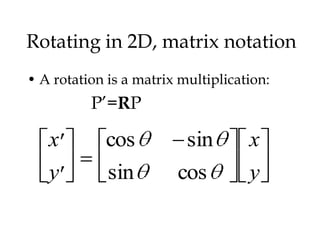


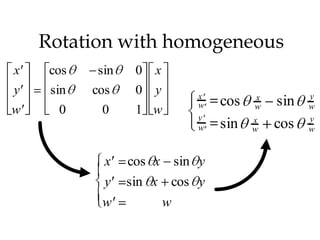

1. 2D transformations like translation, rotation, and scaling can be represented using homogeneous coordinates and matrix multiplication. 2. Homogeneous coordinates add a third coordinate to allow a consistent matrix notation for all transformations. 3. Transformations can be combined by multiplying their matrices in the appropriate order.