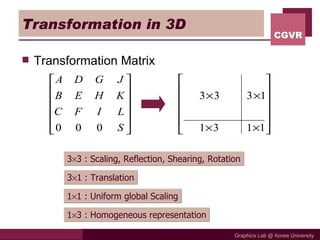
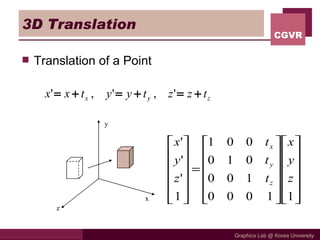
This document discusses various 3D geometric transformations including translation, scaling, rotation, and coordinate transformations. It provides details on:
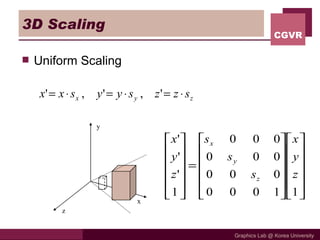
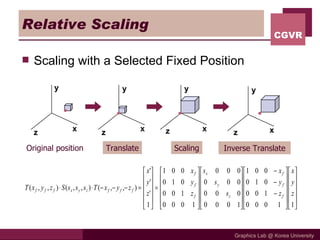
1) How translation, uniform scaling, and relative scaling transformations work in 3D space.
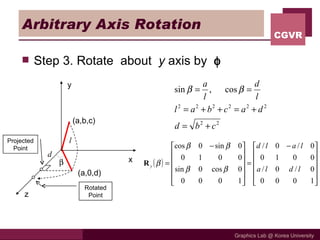
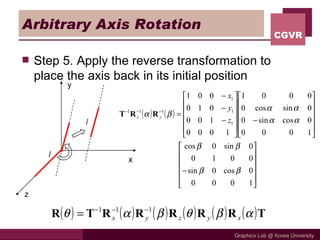
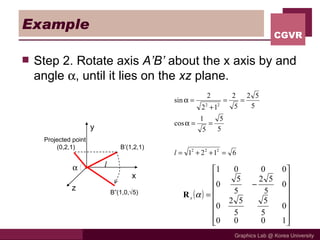
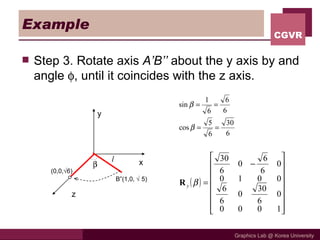
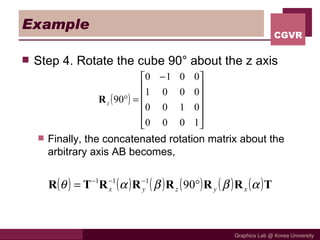
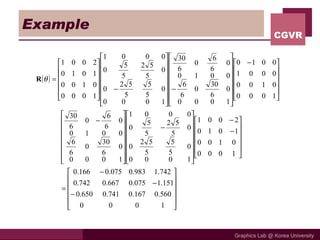
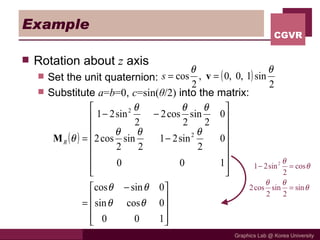
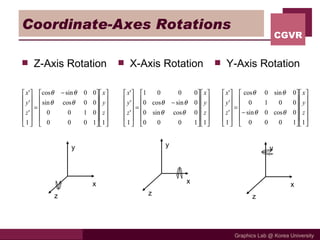
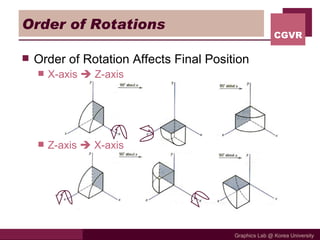
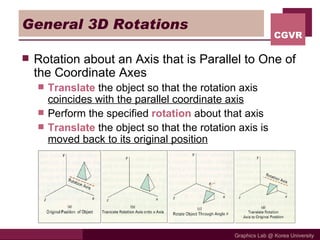
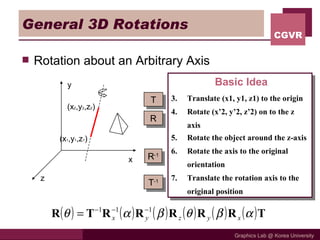
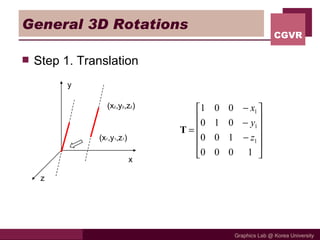
2) How rotations around the x, y, z axes as well as general 3D rotations around arbitrary axes are performed.
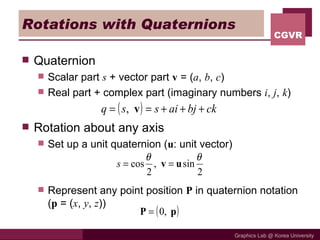
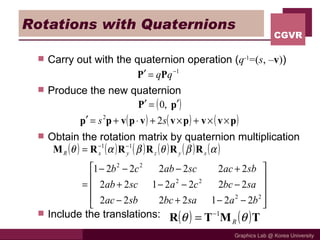
3) How quaternions can be used to represent rotations and how rotation matrices are derived from quaternions.
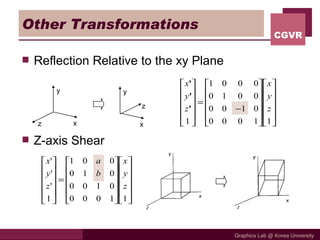
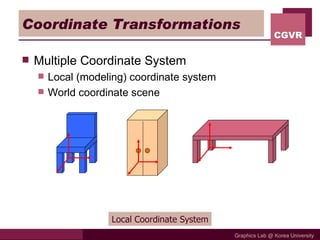
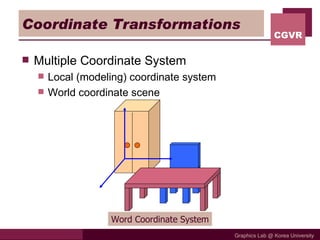
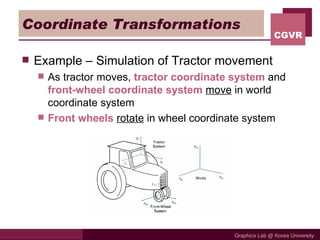
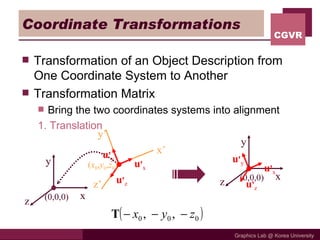
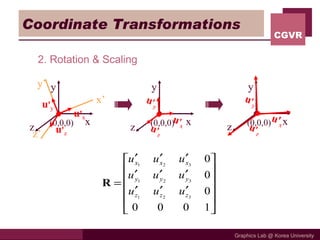
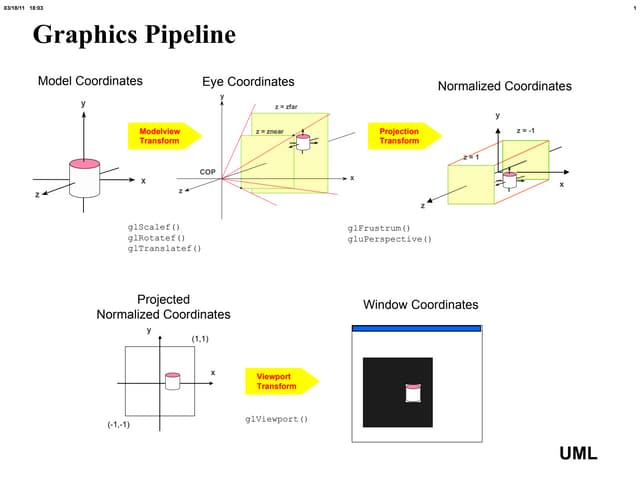
4) How reflections, shears, and different coordinate systems require coordinate transformations between systems.
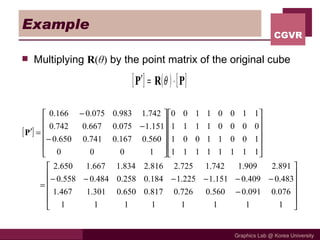
![General 3D Rotations Step 2. Establish [ T R ] x x axis (a,b,c) (0,b,c) Projected Point Rotated Point x y z](https://image.slidesharecdn.com/09transformation3d-110318125344-phpapp01/85/transformation-3d-13-320.jpg)