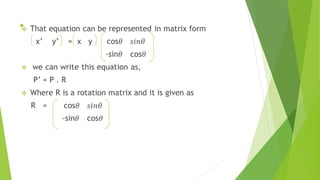
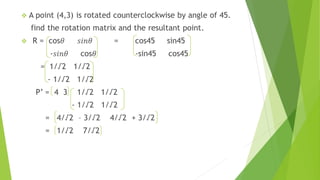
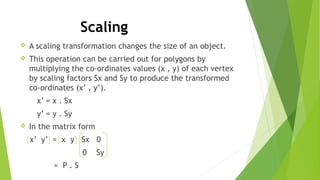
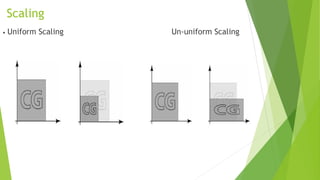
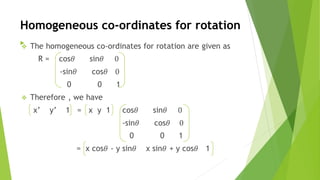
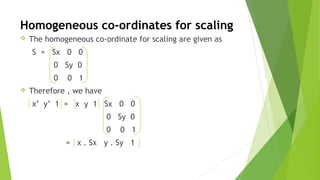
The document discusses 2D transformations in computer graphics, including translation, rotation, and scaling, which adjust an object's position, orientation, or size. It explains the mathematical representations and matrix forms for each transformation, providing examples of translating points and rotating coordinates. Additionally, it introduces homogeneous coordinates for each type of transformation, highlighting their importance in efficiently manipulating geometric objects.





























































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)









