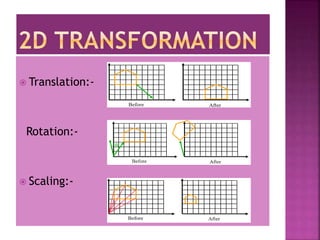
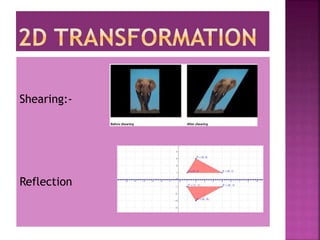
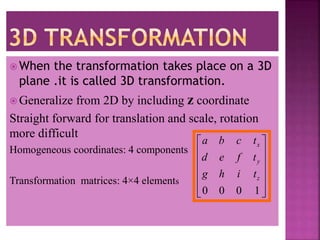
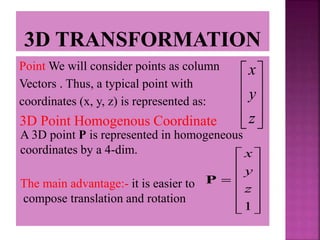
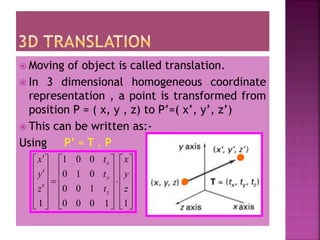
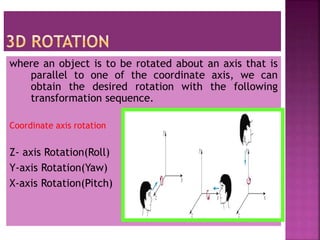
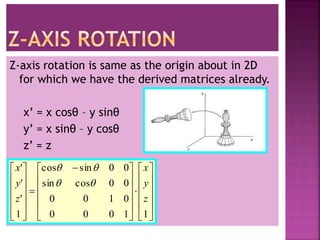
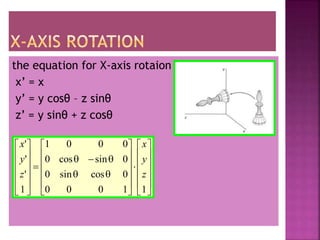
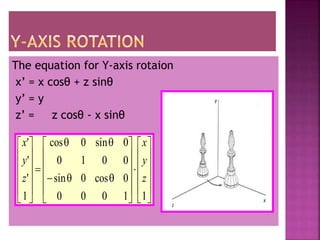
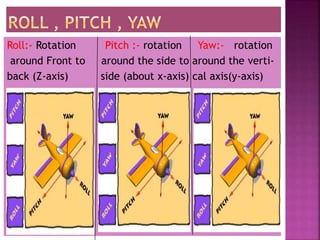
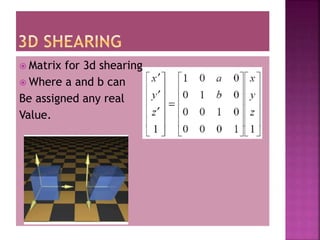
This document discusses different types of 2D and 3D transformations that are used in computer graphics, including translation, rotation, scaling, shearing, and reflection. It provides the mathematical equations and transformation matrices used to perform each type of transformation on 2D and 3D points and objects. Key types of rotations discussed are roll (around z-axis), pitch (around x-axis), and yaw (around y-axis). Homogeneous coordinates are introduced for representing 3D points.