Download to read offline





![Since, the composite transformations are as follows:
Composite Translation:
The two successive translation vectors (tx1, tyl) and (tx2, ty2)
are applied to a coordinate position P, the final transformed location
P' is calculated as
P’=[T{tx2,ty2}.T{tx1,ty1}].P
In matrix form
100
tyty10
txtx01
100
ty10
tx01
.
100
ty10
tx01
12
12
1
1
2
2
Hence, two successive translations are additive.
Composite Rotation
Two successive rotations applied to point p product the transformed
position
P' = {R(θ2) . R(θ1) }. P
By multiplying the two rotation matrices, we can verify that two
successive rotations are additive
PRP
PRRP
)..('
).().('
12
12
so that the final rotated coordinates with the composite rotation matrix is
100
0)21cos()21sin(
0)21sin(-)21cos(
Composite Scaling
Concatenating transformation matrices for two successive scaling
operations produces the following composite scaling matrix:
100
0Sy.Sy0
00Sx.Sx
100
0Sy0
00Sx
.
100
0Sy0
00Sx
1
1
2
2
OR
).,.().()..( 21211122 sysysxsxSsysxSsysxS
The resulting matrix indicates that successive scaling operations are
multiplicative. To triple the size of an object twice in succession, then the
final size would be nine times of original object.](https://image.slidesharecdn.com/transformation-200611084435/75/2D-Transformation-7-2048.jpg)



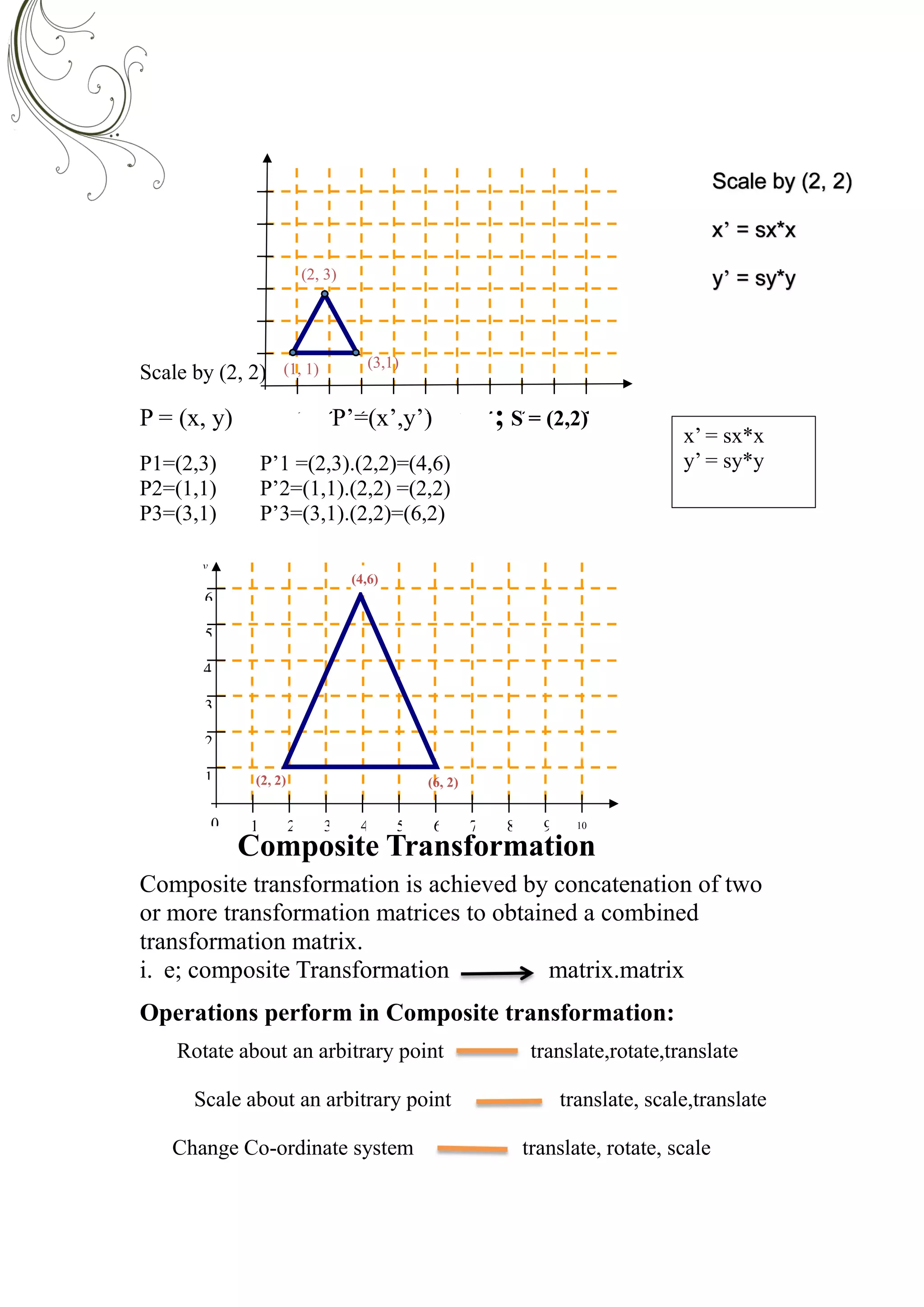
This document summarizes the process of 2D transformations and window to viewport transformation in computer graphics. It describes basic 2D transformations including translation, rotation, scaling and their equation representations. It also explains the concept of composite transformations and discusses translation, rotation and scaling as composite transformations. Finally, it provides details about the window to viewport transformation including translating and scaling the window to fit within the viewport boundaries.