Downloaded 222 times

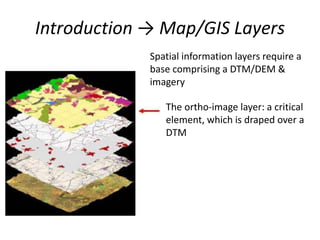

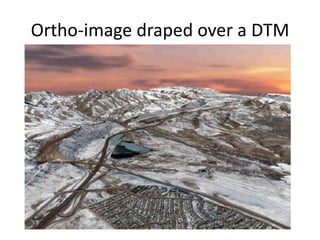
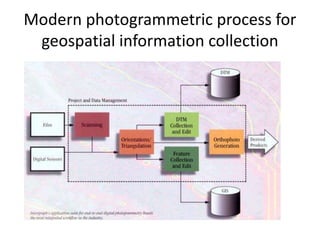










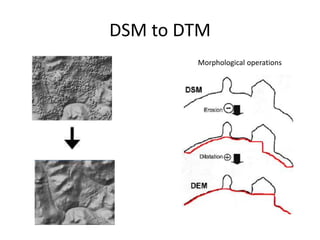

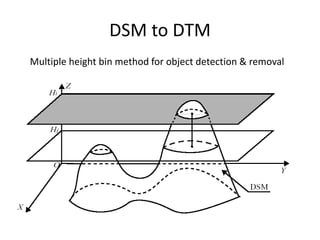





DTM/DEM generation involves creating digital models of terrain elevation from various data sources. A DTM provides height values referenced to positions and can include other terrain features, while a DEM only provides regular elevation values. Photogrammetry and remote sensing are common methods to acquire elevation data and generate DTMs/DEMs. The data often needs editing and filtering to remove errors and refine the models. Raster and TIN representations are common formats, with rasters using a grid and TINs using irregular triangles. Accuracy depends on factors like the data source and grid size for rasters. DSMs include above-ground features and require processing to derive bare earth DTMs below the features.