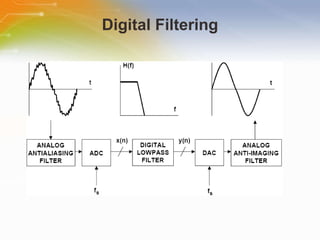
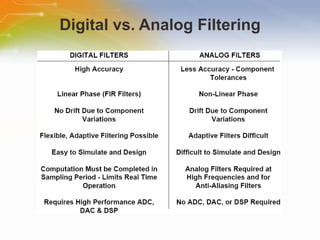
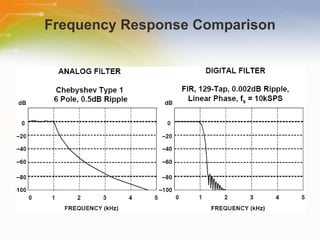
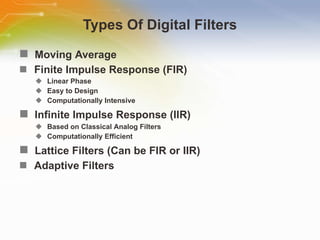
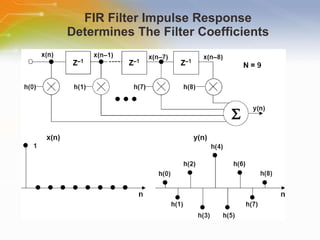
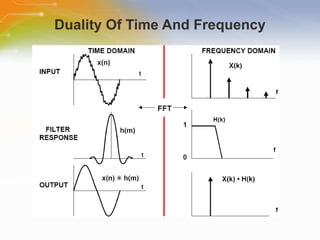
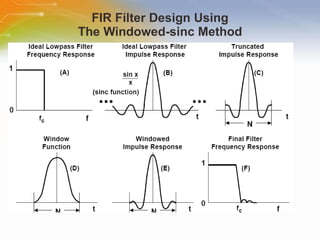
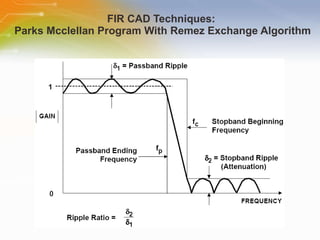
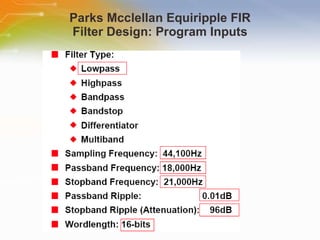


This document provides an overview of digital filters and focuses on finite impulse response (FIR) filters. It defines digital filtering and compares it to analog filtering. It describes different types of digital filters including FIR filters and explains how to design, implement and characterize FIR filters. Key aspects of FIR filters are that they have a finite impulse response, linear phase, and are always stable. Design techniques like windowing methods and Parks-McClellan optimization are covered.