This document discusses digital filter design methods. It introduces IIR and FIR filters and their design techniques. The key methods covered are:
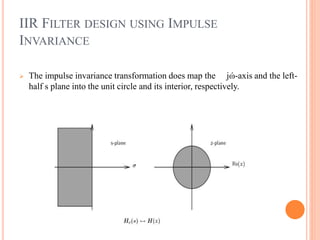
1. IIR filter design using impulse invariance, which samples the impulse response of an analog filter to obtain the discrete-time filter.
2. IIR filter design using bilinear transformation, which maps the continuous s-domain to the discrete z-domain to avoid aliasing.
3. FIR filter design using frequency sampling, which designs a linear phase FIR filter by sampling the desired frequency response and taking the inverse DFT.



![FIR FILTER DESIGN BY FREQUENCY
SAMPLING TECHNIQUE
We wish to derive a linear phase IIR filter with real nonzero h(n) .
The impulse response must be symmetric
where are real and denotes the integer part
[ /2]
0
1
2 ( 1/ 2)
( ) 2 cos( )
1
M
k
k
k n
h n A A
M
kA [ / 2]M](https://image.slidesharecdn.com/naimishdsp-170712223646/85/FILTER-DESIGN-14-320.jpg)
![FIR FILTER DESIGN BY FREQUENCY
SAMPLING TECHNIQUE
with corresponding transform
where
Hence
which has a linear phase
1
0
/2
( ) ( )
N
k
k
k N
H z H z
/
2 / 1
(1 )
( )
1
j k N N
k
k j k N
A e z
H z
e z
' ( 1)/2 sin / 2
( )
sin[( / / 2)]
j T N
k k
TN
H A e
k N T
](https://image.slidesharecdn.com/naimishdsp-170712223646/85/FILTER-DESIGN-16-320.jpg)