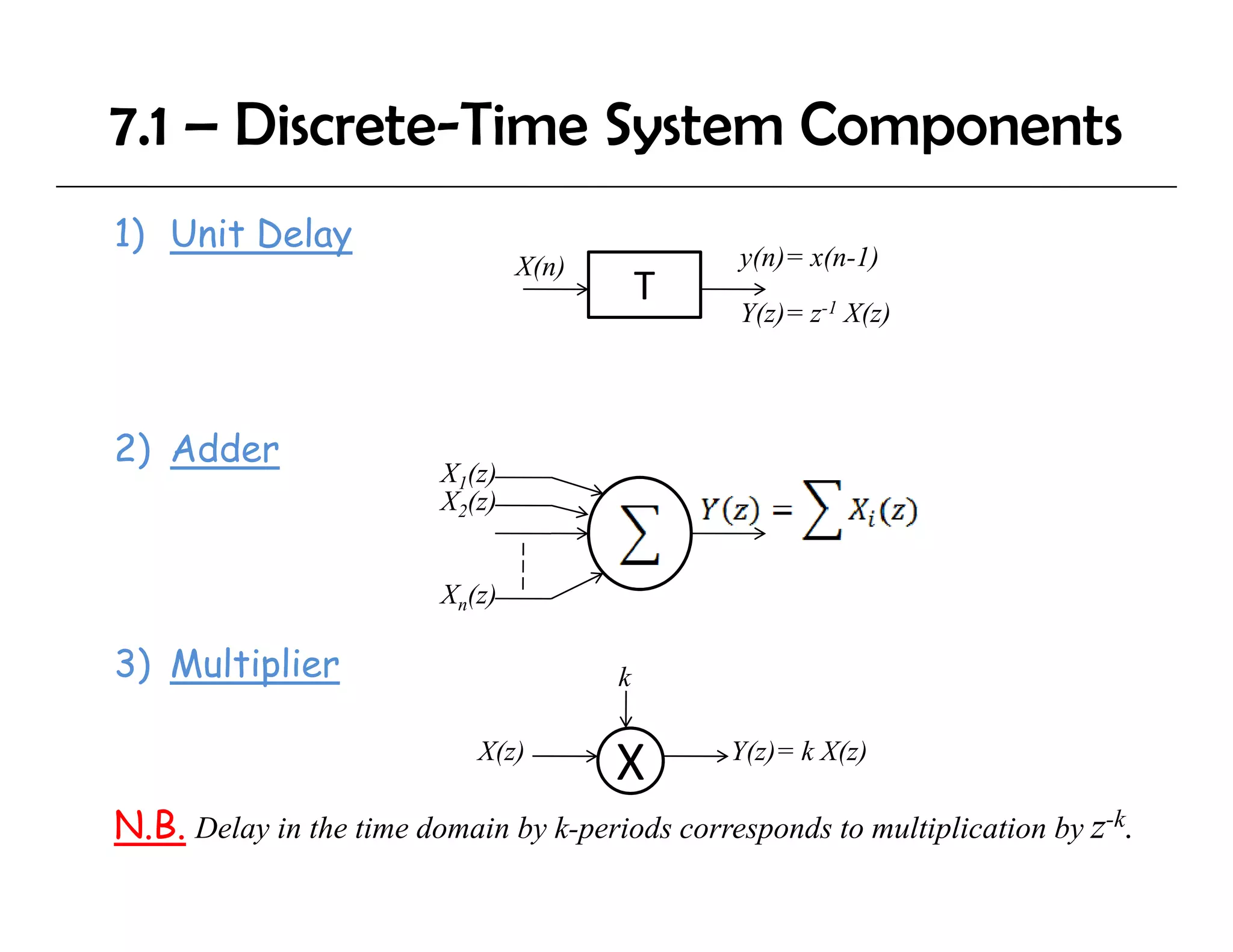
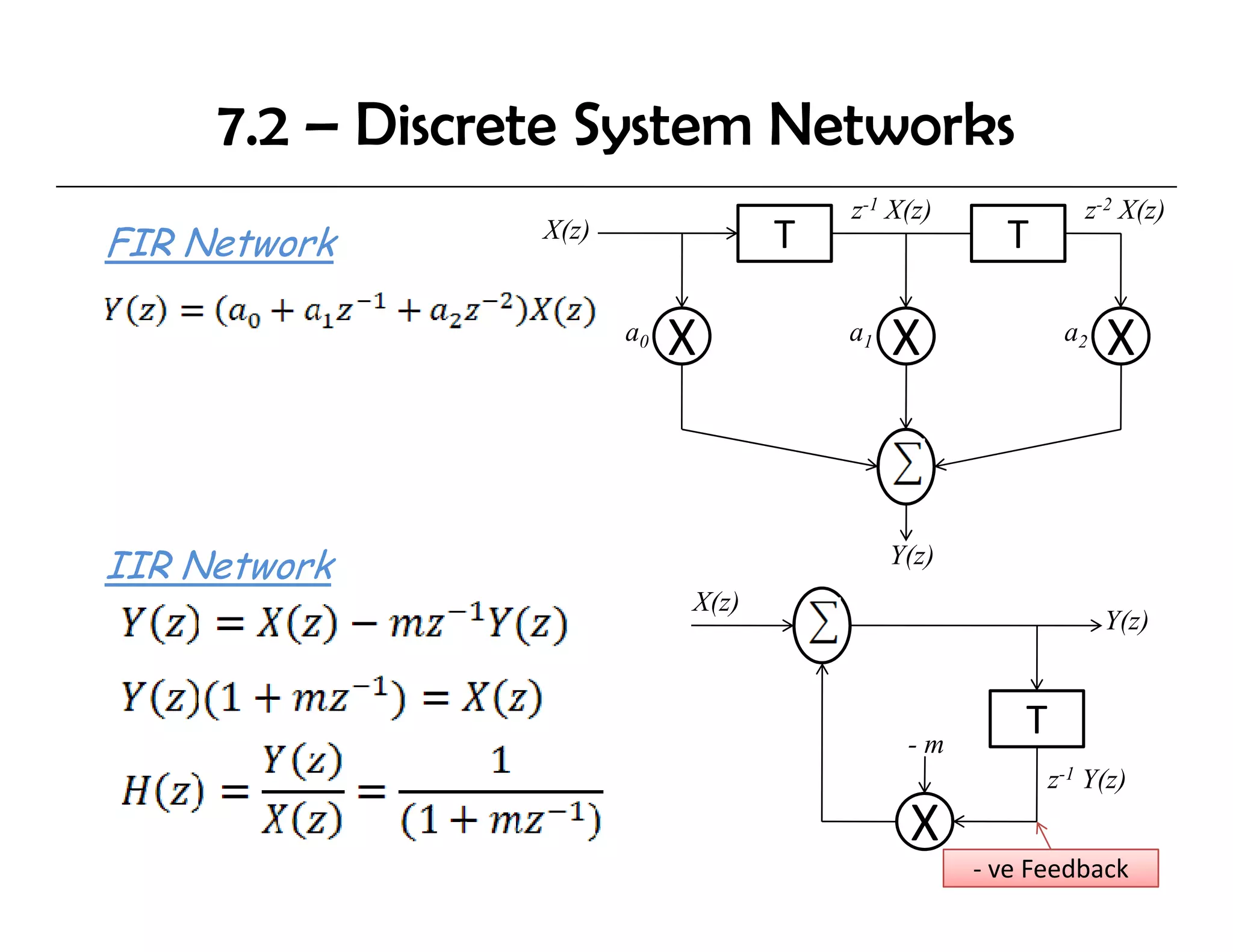
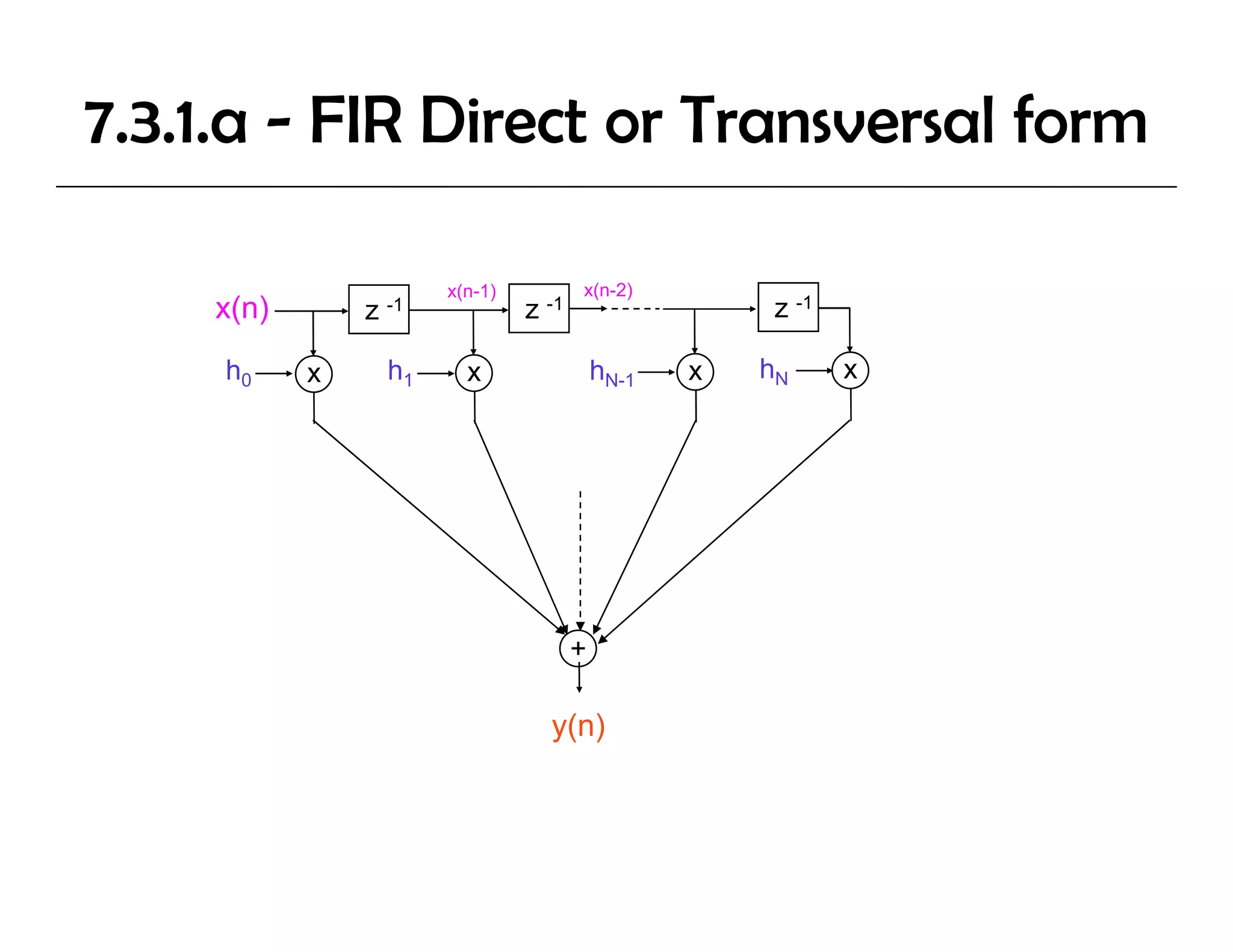
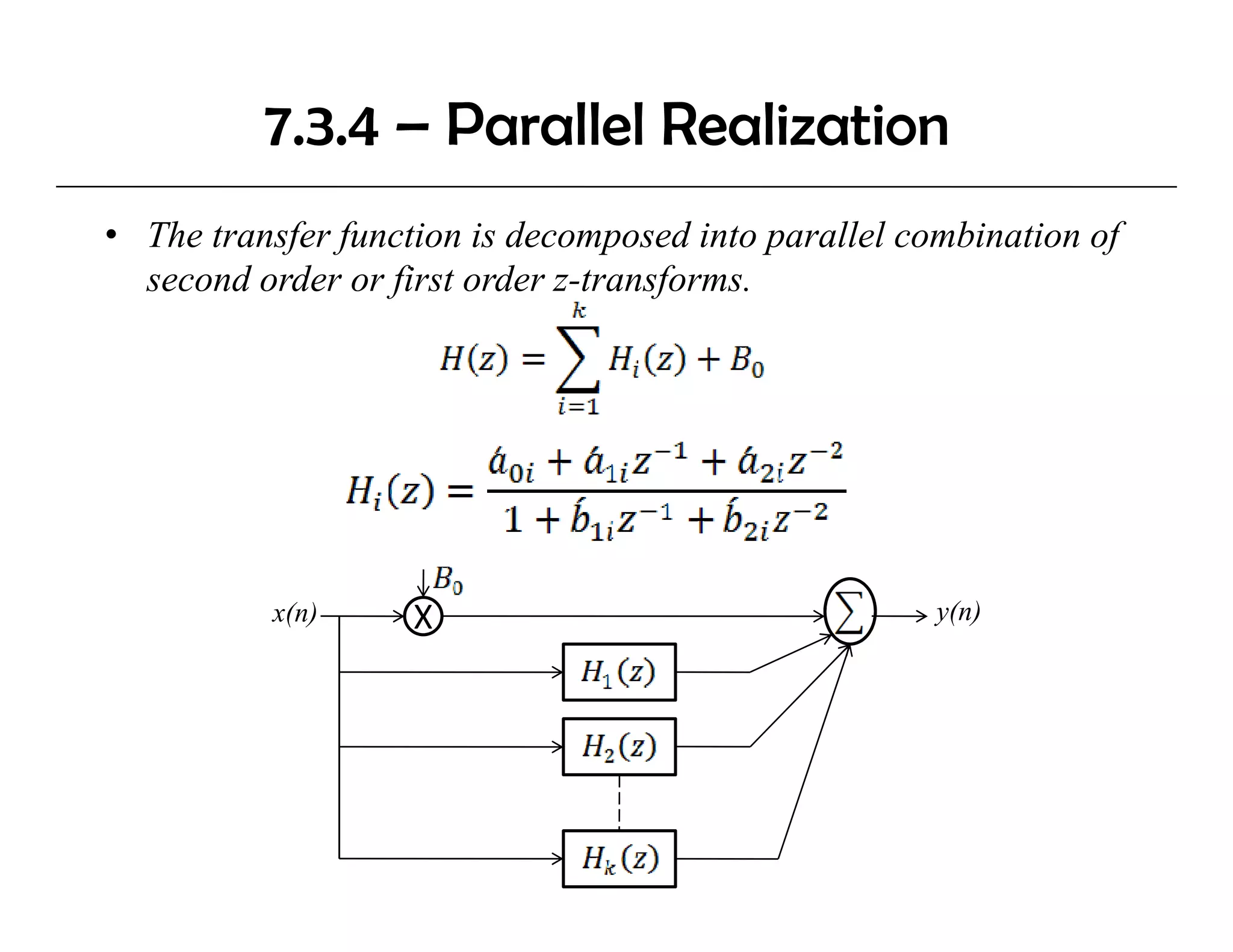
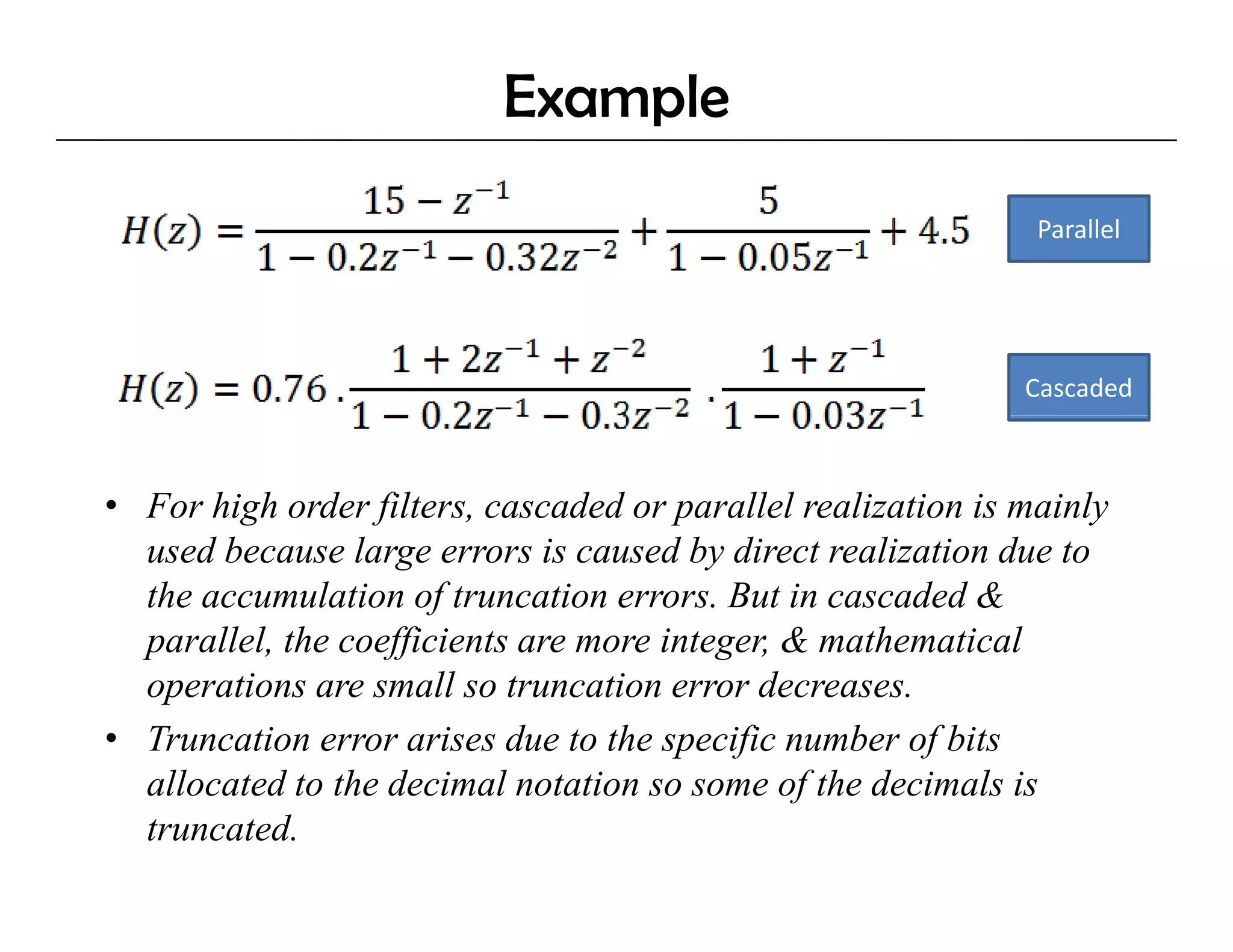
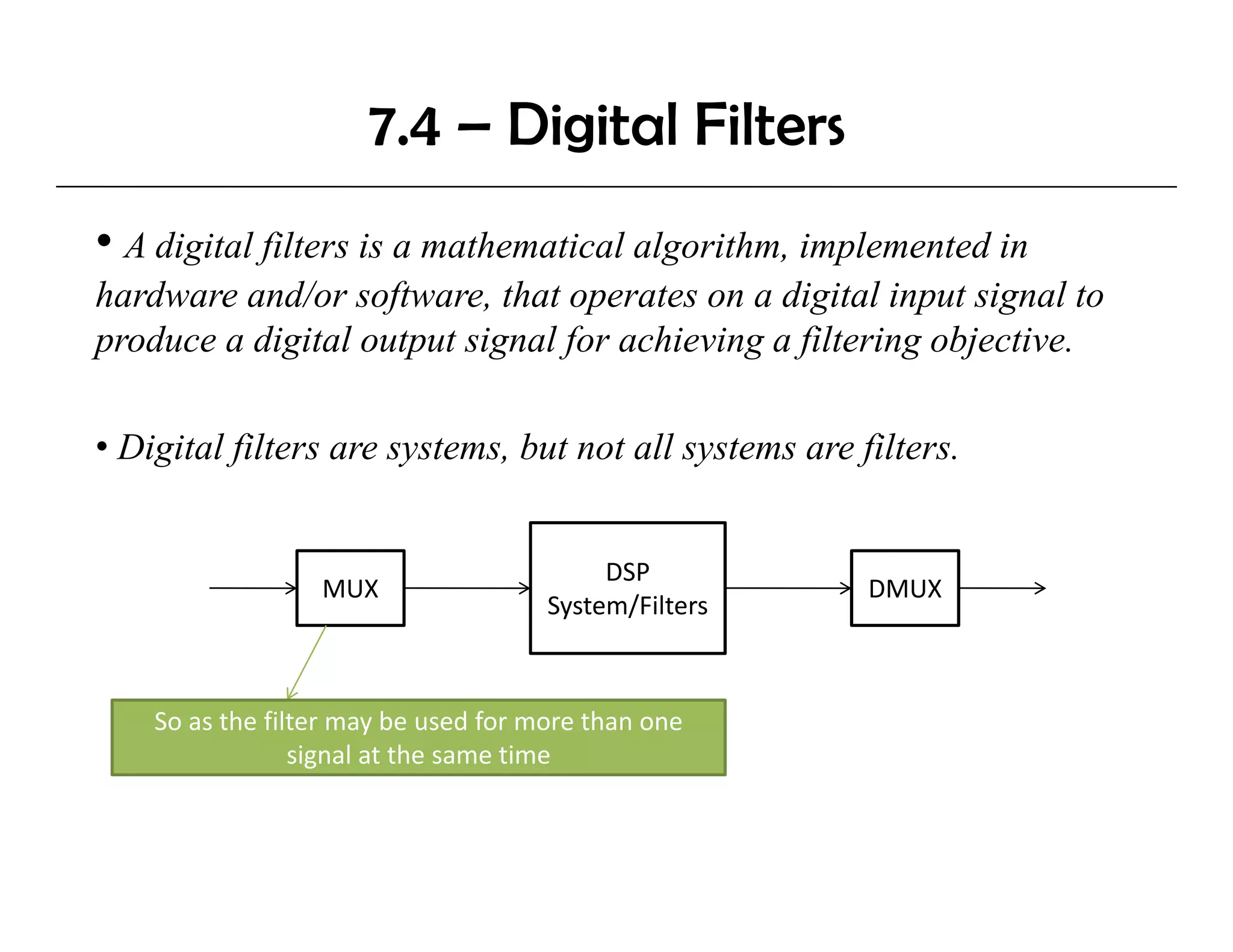
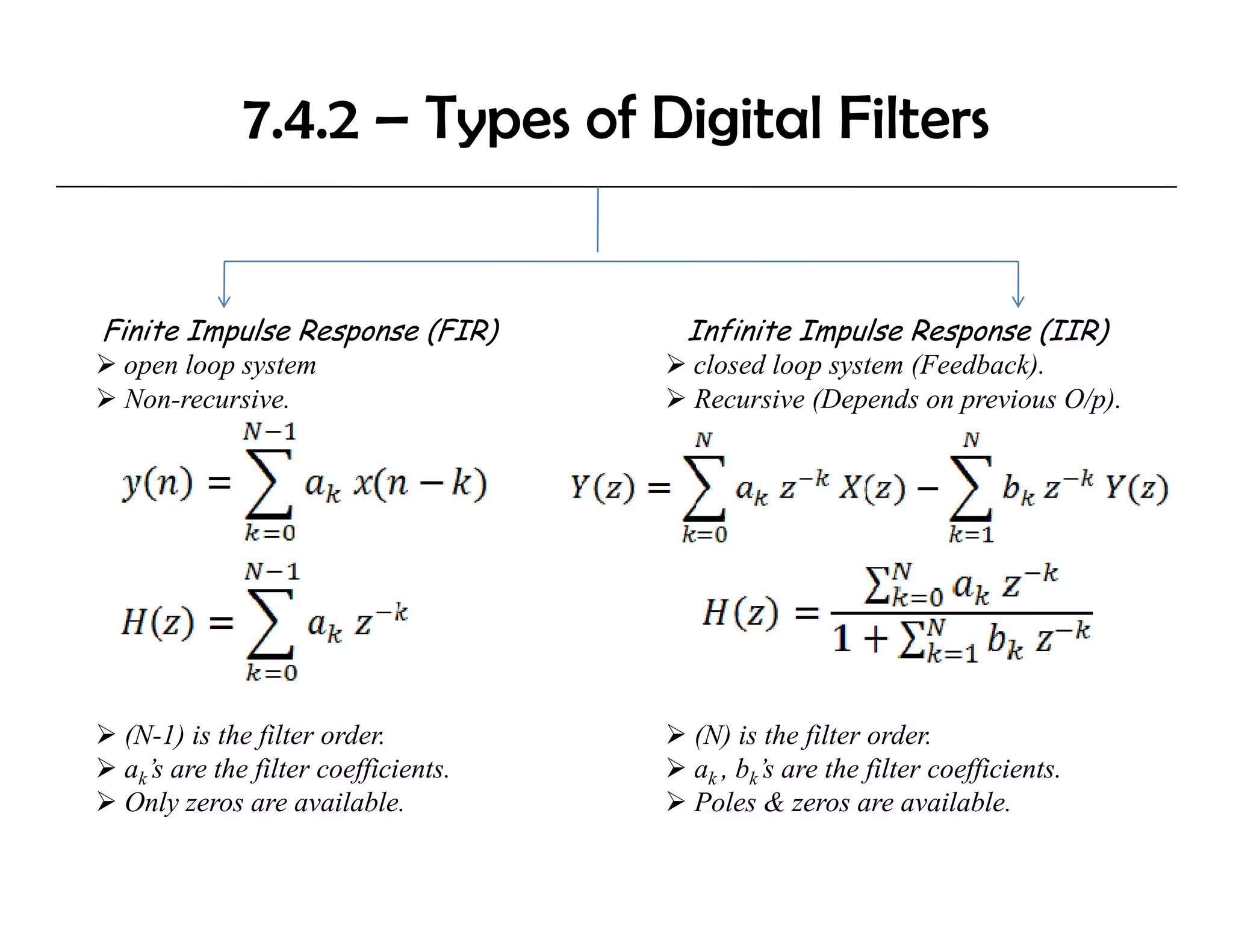
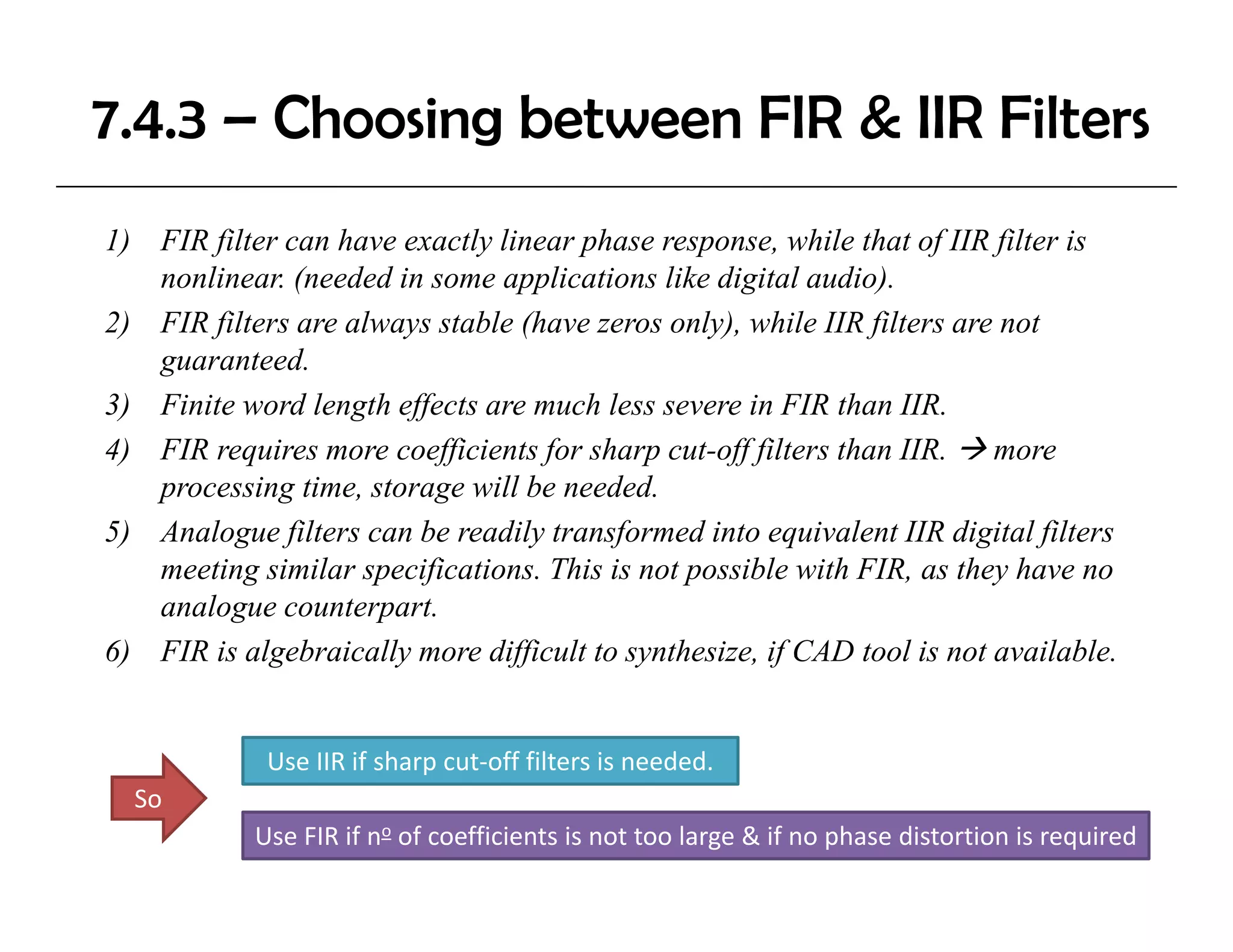
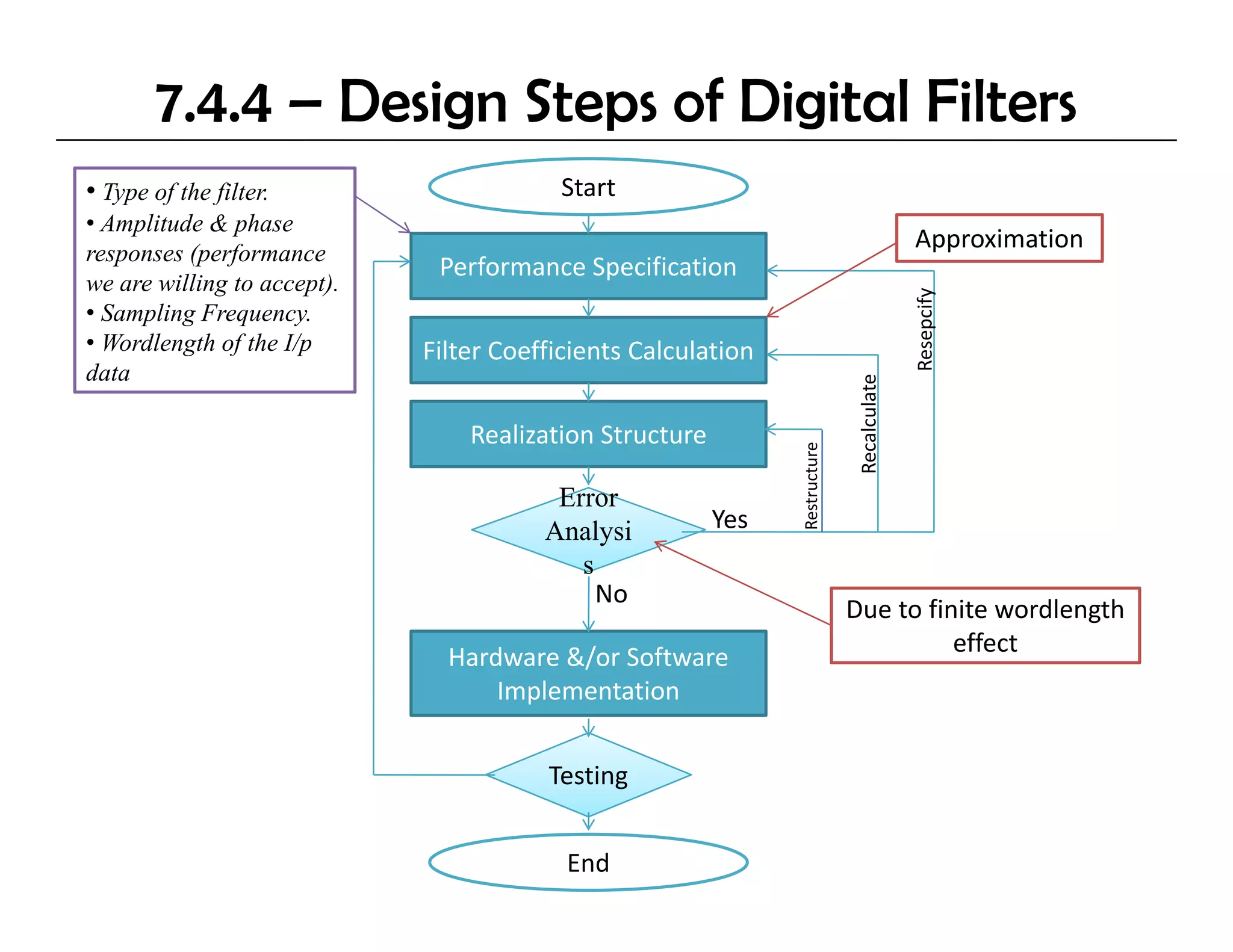
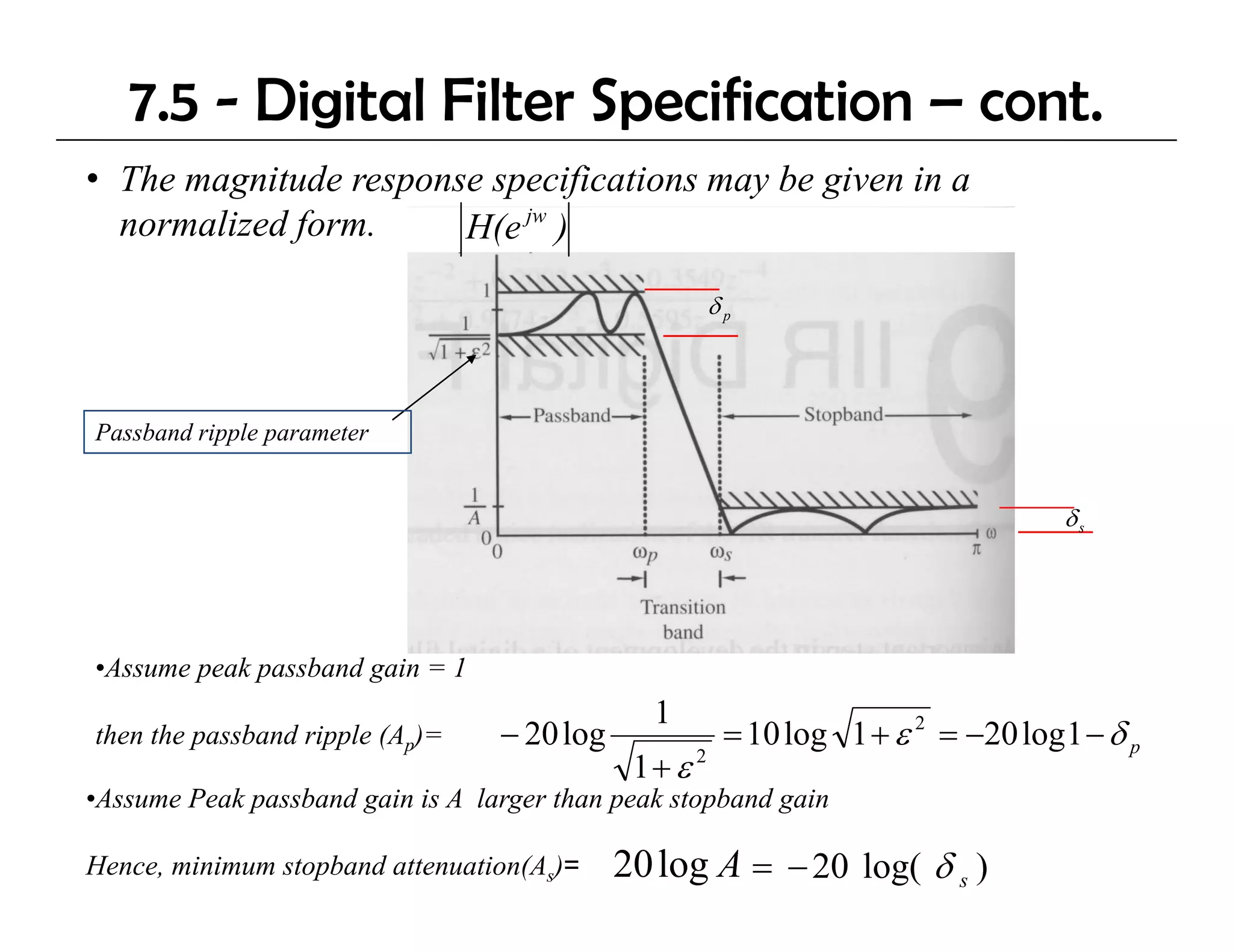
This document provides an overview of discrete-time systems and digital signal processing. It discusses discrete-time system components like unit delays and adders. It also covers discrete system networks including FIR and IIR networks. Various realizations of discrete systems are presented, including direct form I and II, cascaded, and parallel realizations. Digital filters are defined and the advantages and disadvantages as well as types (FIR and IIR) are discussed. Design steps and specifications for digital filters are also outlined.









![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)