

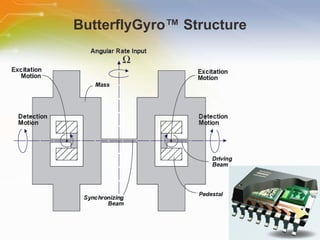


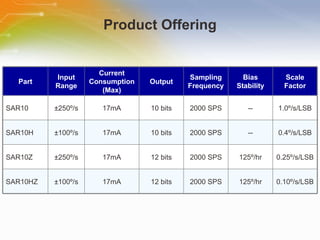
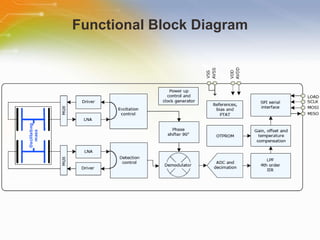
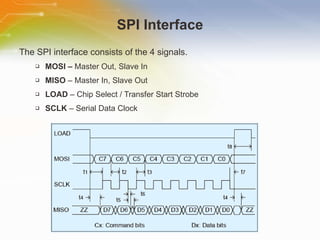
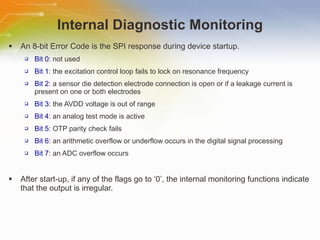



The document introduces medium performance gyroscopes from Sensonor Technologies, including their Butterfly Gyro structure and key features of models SAR10/SAR10Z. The gyroscopes offer high reliability, low power consumption, fully digital interface, and on-chip diagnostic monitoring. They are targeted at applications including industrial, aerospace, subsea, and gaming. Evaluation boards are available to help customers test and evaluate the gyroscopes.










































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)









