Downloaded 84 times

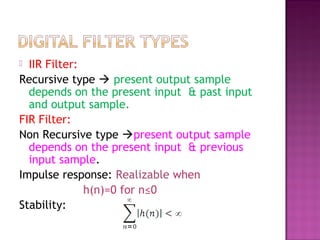


































1. The document discusses and compares analog and digital filters. Digital filters are described as processing digital data/signals using elements like adders and multipliers, while analog filters use electronic components. 2. It also summarizes different types of common digital filters like Butterworth and Chebyshev filters. Butterworth filters have a monotonic magnitude response while Chebyshev filters exhibit ripple in the passband or stopband. 3. The document outlines different methods to convert analog filters to digital filters, including bilinear transformation which maps the s-plane jΩ axis to the unit circle in the z-plane to avoid aliasing.