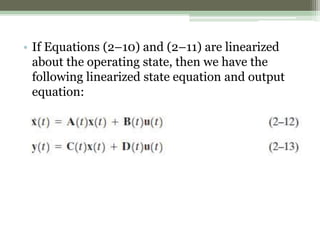
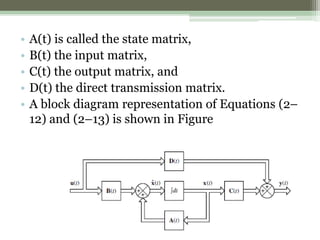
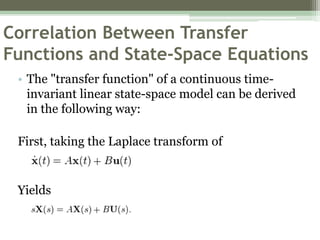
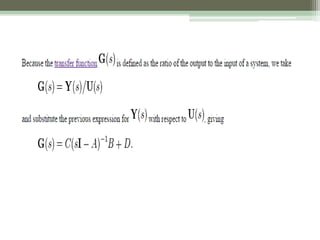
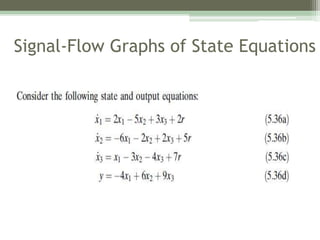
The document discusses state-space representation as a method for modeling linear, time-invariant systems using matrices and vectors to describe inputs, outputs, and state variables. It explains the concepts of state, state variables, state vectors, and state space, and emphasizes the advantages of state-space modeling for complex systems. Additionally, it covers the correlation between transfer functions and state-space equations, detailing how to derive transfer functions from state-space models.