This document discusses observer-based control system design. It introduces full order and reduced order state observers, which estimate all or some unmeasurable state variables, respectively. The full order state observer design problem is shown to be mathematically equivalent to the pole placement problem. This "duality property" allows solving the observer design problem using pole placement techniques for the dual system. Methods for determining the observer gain matrix K include using a transformation matrix P, direct substitution, and Ackermann's formula. The observer poles should be placed faster than the controller poles for accurate state estimation. An example designs a full order observer for a given system to achieve desired closed loop poles.







![Full Order State Observer
• The order of the state observer that will be discussed here is
the same as that of the plant.
• Consider the plant define by following equations
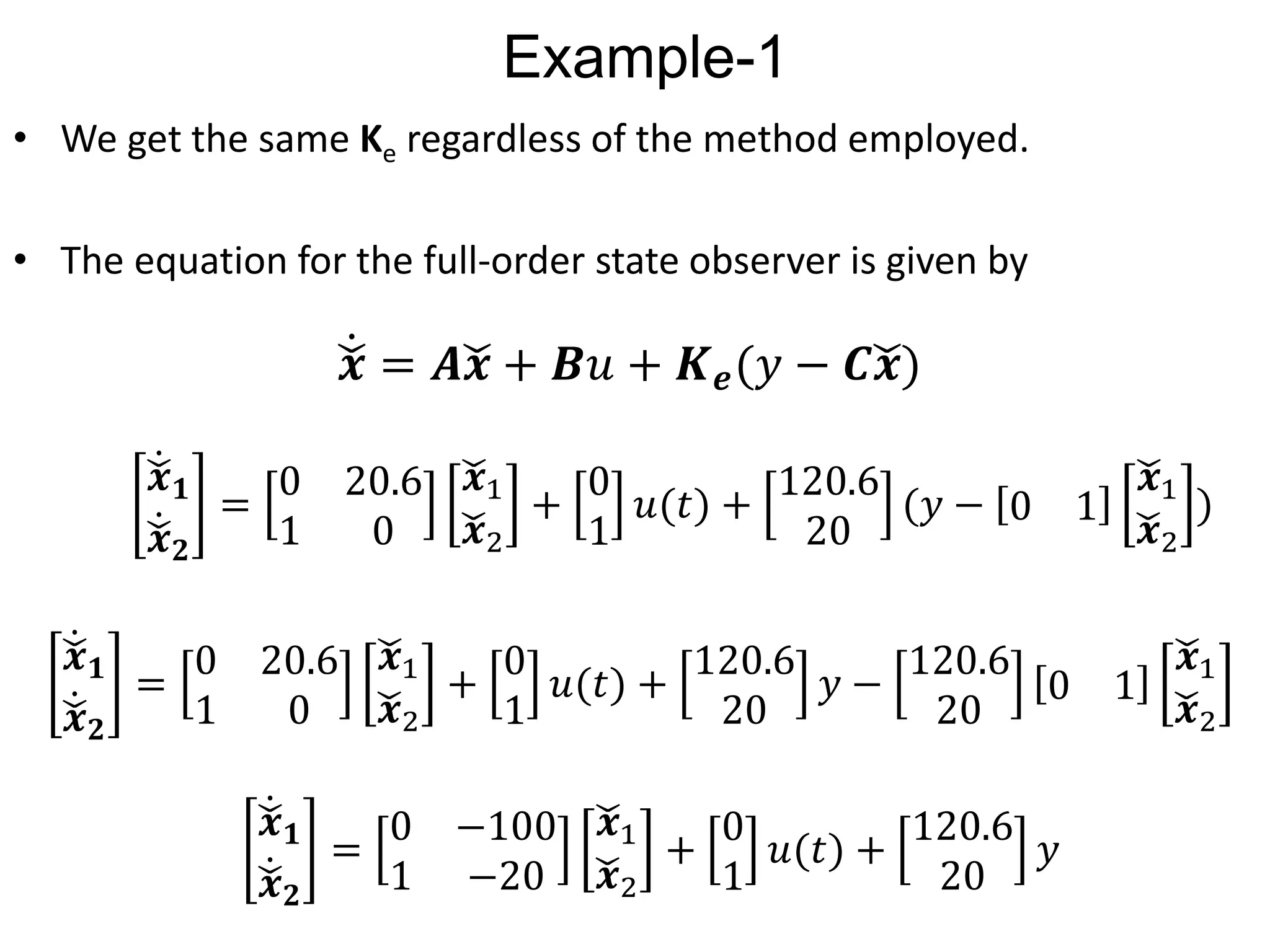
• Equation of state observer is given as
• To obtain the observer error equation, let us subtract
Equation (2) from Equation (1):
𝑦 = 𝑪𝒙
𝒙 = 𝑨𝒙 + 𝑩𝑢 (1)
𝒙 = 𝑨𝒙 + 𝑩𝑢 + 𝑲𝑒(𝑦 − 𝑪𝒙) (2)
𝒙 − 𝒙 = 𝑨𝒙 + 𝑩𝑢 − [𝑨𝒙 + 𝑩𝑢 + 𝑲𝑒 𝑦 − 𝑪𝒙 ]
𝒙 − 𝒙 = 𝑨𝒙 + 𝑩𝑢 − 𝑨𝒙 − 𝑩𝑢 − 𝑲𝑒 𝑪𝒙 − 𝑪𝒙](https://image.slidesharecdn.com/lecture18-19stateobserverdesign-230603171041-acdbd6fe/75/lecture_18-19_state_observer_design-pptx-11-2048.jpg)