State :
It isa group of variables, which summarizes the history of the system
in order to predict the future values (outputs).
State Variable:
The number of the state variables required is equal to the number of
the storage elements present in the system.
State Vector:
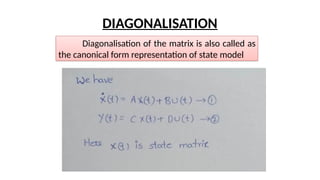
Terms used in State Space Model
It is a vector, which contains the state variables as elements.
The state space model can be obtained from any one of these two
mathematical models
Those are the differential equation model and the transfer function model .
3.
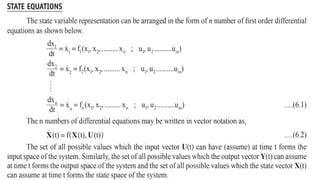
State Variable: Thestate of a dynamic system is the smallest set of
variables called state variables such that the knowledge of these variables at
time t=to (Initial condition), together with the knowledge of input for ≥ 0 ,
𝑡
completely determines the behavior of the system for any time ≥ 0 .
𝑡 𝑡
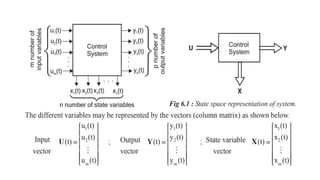
State vector: If n state variables are needed to completely describe the
behaviour of a given system, then these n state variables can be considered the n
components of a vector X. Such a vector is called a state vector.
State space: The n-dimensional space whose co-ordinate axes consists of the
x1 axis, x2 axis,.... xn axis, where x1 , x2 ,..... xn are state variables: is called a
state space
4.
Advantages of StateSpace Method(SSM)
It can analyze multi input and multi output systems easily
It can gives the information about controllability of the system
It can describes all dynamic Systems
The analysis of the system can be possible by considering the initial
conditions of the system
Accurate than Transfer Function
Dis- Advantages:
More computations are required
Techniques are more complex compared to T.F,,D.E
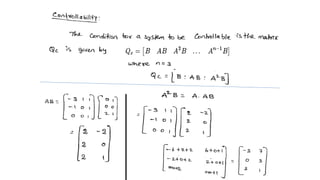
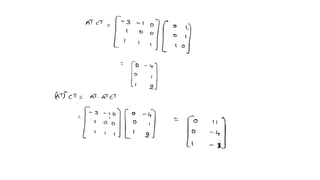
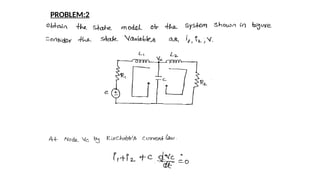
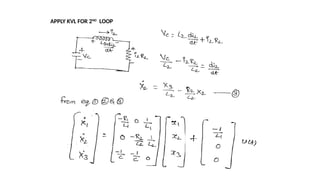
48.
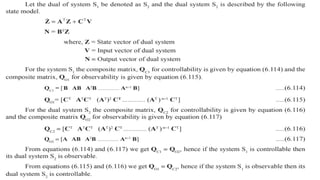
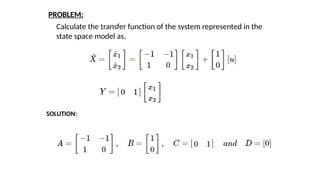
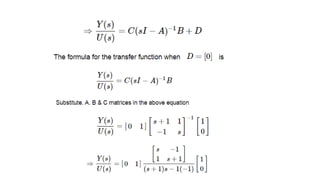
Problem on
controllability andobservability
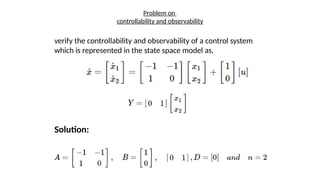
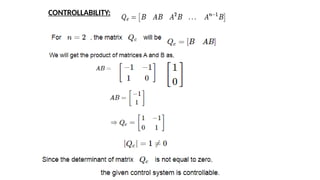
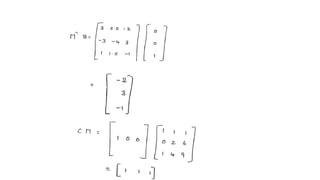
verify the controllability and observability of a control system
which is represented in the state space model as,
Solution:
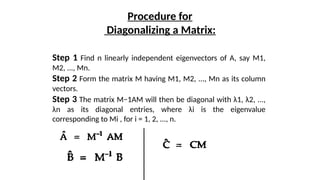
Procedure for
Diagonalizing aMatrix:
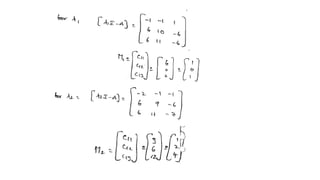
Step 1 Find n linearly independent eigenvectors of A, say M1,
M2, ..., Mn.
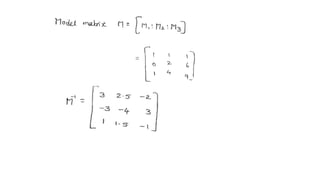
Step 2 Form the matrix M having M1, M2, ..., Mn as its column
vectors.
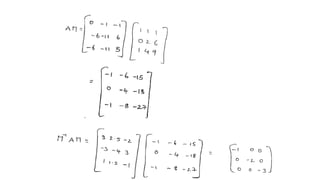
Step 3 The matrix M−1AM will then be diagonal with λ1, λ2, ...,
λn as its diagonal entries, where λi is the eigenvalue
corresponding to Mi , for i = 1, 2, ..., n.
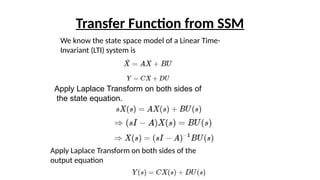
Transfer Function fromSSM
We know the state space model of a Linear Time-
Invariant (LTI) system is
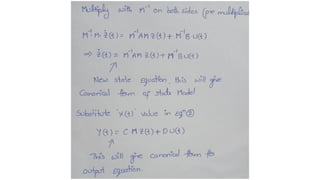
Apply Laplace Transform on both sides of
the state equation.
Apply Laplace Transform on both sides of the
output equation