State space analysis provides a powerful modern approach for modeling and analyzing control systems. It represents a system using state variables and state equations. This allows incorporating initial conditions, applying to nonlinear/time-varying systems, and providing insight into the internal state of the system. A state space model consists of state equations describing how the state variables change over time, and output equations relating the outputs to the states and inputs. Common applications include modeling physical dynamic systems using energy-storing elements as states, and obtaining linear models for linear time-invariant systems. State space analysis provides advantages over traditional transfer function methods.

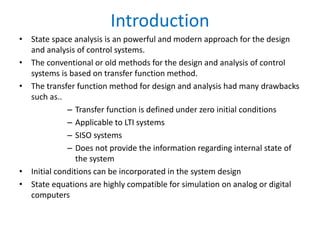



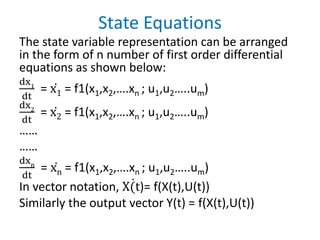










![Arrange the differential equations and output equation into standard
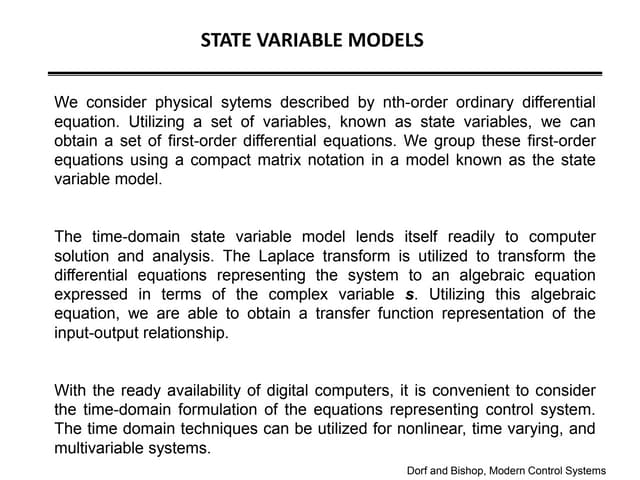
form of state space model as,
ሶ
X =
di(t)
dt
dvc
(t)
dt
=
−R
L
−1
L
1
C
0
i(t)
vc(t)
+
1
L
0
vi(t)
Y = 0 1
i(t)
vc(t)
Ẋ(t) = A X(t) + B U(t)
Y(t) = C X(t) + D U(t)
Here A =
−R
L
−1
L
1
C
0
; B =
1
L
0
; C = 0 1 ; D = [0]](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-20-320.jpg)













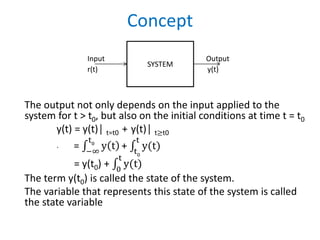
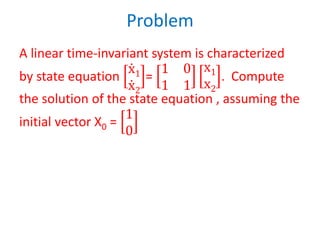
![writing the above state equation in vector matrix form,
ሶ
X(t) = AX(t) + Bu(t)
ሶ
x1
ሶ
x2
.
ሶ
x𝑛
=
0
0
⋯
0
0
⋮ ⋱ ⋮
−𝑎𝑛 ⋯ −𝑎1
x1
x2
.
x𝑛
+
0
0
.
1
[u]
Output equation can be written as
Y(t) = C X(t)= 1 0 0 . .
x1
x2
.
x𝑛](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-34-320.jpg)


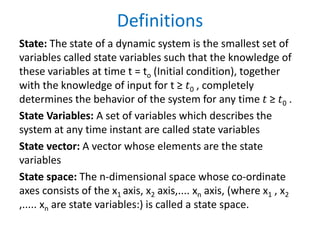
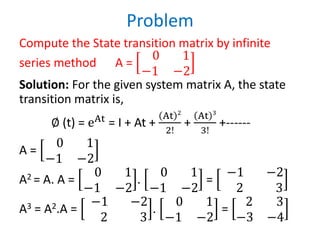
![The state equations are
ሶ
x1 = x2
ሶ
x2 = x3
ሶ
x3 = - 6x1- 11x2 - 6x3 - u
Arranging the state equations in the matrix form,
ሶ
x1
ሶ
x2
ሶ
x3
=
0 1 0
0 0 1
−6 −11 −6
x1
x2
x3
+
0
0
−1
[u]
Here y = output
But y = x1
∴ The output equation is, y = [1 0 0]
x1
x2
x3](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-37-320.jpg)






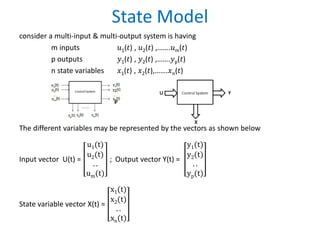
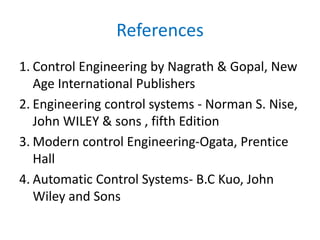
![Problem
Obtain the state model of the system whose transfer
function is given by
Y(s)
U(s)
=
24
𝑠3
+9𝑠2
+26𝑠+24
Solution:
Y(s)
U(s)
=
24
𝑠3
+9𝑠2
+26𝑠+24
Cross-multiplying yields
[s3 + 9s2 + 26s + 24] Y(s) = 24 U(s)
s3 Y(s) + 9s2 Y(s) + 26sY(s) + 24 Y(s) = 24U(s)
Taking inverse Laplace transforms,
d3
y(t)
dt3 + 9
d2
y(t)
dt2 + 26
dy(t)
dt
+ 24 y(t) = 24u(t)
ഺ
y(t) + 9 ሷ
y(t) + 26 ሶ
y(t) + 24 y(t) = 24u(t)](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-44-320.jpg)

![Putting equations 1, 2 and 3 in matrix form,
ሶ
x1
ሶ
x2
ሶ
x3
=
0 1 0
0 0 1
−24 −26 −9
x1
x2
x3
+
0
0
24
[u]
The output expression is y(t) = x1(t)
= 1 0 0
x1
x2
x3](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-46-320.jpg)


![Then the state equation is, ሶ
x2 = -x1-x2+u
The output equation is, y(t) = y = x1
The state space model is
ሶ
x =
ሶ
x1
ሶ
x2
= =
0 1
−1 − 1
x1
x2
+
0
1
[u]
Y= 1 0
x1
x2](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-49-320.jpg)

![Consider equation (2),
C(s)
U(s)
=
1
s3
+9s2
+26s+24
Cross-multiplying on both sides,
[s3 + 9s2 + 26s + 24] C(s) = U(s)
s3 C(s) + 9s2 C(s) + 26s C(s) + 24 C(s) = U(s)
Taking inverse Laplace transform,
d3
c(t)
dt3 + 9
d2
c(t)
dt2 + 26
dc(t)
dt
+ 24 c(t) = u(t)
ഺ
c (t) + 9 ሷ
c(t) + 26 ሶ
c(t) +24 c(t) = u(t)
x1(t) = c(t)
ሶ
x1(t) = x2(t) = ሶ
c(t) -----(3)
ሶ
x2(t) = x3(t) = ሷ
c(t) -----(4)
ሶ
x3(t) = ഺ
c(t)](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-51-320.jpg)
![ഺ
c (t) + 9 ሷ
c(t) + 26 ሶ
c(t) + 24c(t) = u(t)
ሶ
x3(t) + 9 x3(t) + 26x2(t) + 24x1(t) = u(t)
ሶ
x3(t) = - 24x1(t) - 26x2(t) - 9 x3(t) + u(t) -----(5)
Putting equations 3, 4 and 5 in matrix form,
ሶ
x1
ሶ
x2
ሶ
x3
=
0 1 0
0 0 1
−24 −26 −9
x1
x2
x3
+
0
0
1
[u]](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-52-320.jpg)
![Consider equation (1),
Y(s)
C(s)
= s2 + 7s + 2
Y(s) = [s2 + 7s + 2]C(s)
Y(s) = s2C(s) + 7sC(s) + 2C(s)
Taking inverse Laplace transform,
y(t) = ሷ
c(t) + 7 ሶ
c(t) +2c(t)
y(t) = 2x1(t) + 7x2(t) + x3(t)
y(t) = 2 7 1
x1
x2
x3](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-53-320.jpg)


![Y(s)
U(s)
=
2(s+5)
(s+2)(s+3)(s+4)
=
3
(s+2)
-
4
(s+3)
+
1
(s+4)
-----(1)
=
3
s(1+2/s)
-
4
s(1+3/s)
+
1
s(1+4/s)
=
1
s
(1+
1
s
∗2)
x 3 -
1
s
(1+
1
s
∗3)
x 4 +
1
s
(1+
1
s
∗4)
∴ Y s = [
1
s
(1+
1
s
∗2)
x 3 -
1
s
(1+
1
s
∗3)
x 4 +
1
s
(1+
1
s
∗4)
]u(s)
= [
1
s
(1+
1
s
∗2)
x 3]U(s) - [
1
s
(1+
1
s
∗3)
x 4] U(s) + [
1
s
(1+
1
s
∗4)
]u(s)](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-56-320.jpg)




![Solution of State Equation
S-Domain:
The State equation of nth order system is given by,
ሶ
x(t) = A X(t) + BU(t); X(0) = X0 = initial condition vector
Taking Laplace transforms on both sides,
S X(s)-X(0) = A X(s) + B U(s)
X(s)[sI-A] = X(0) + B U(s) where I = unit matrix
X(s) = [sI-A]-1 X(0) + [SI-A]-1 B U(s) --------------(1)
Taking inverse Laplace transforms on both sides,
X(t) = L-1 [sI-A]-1 X(0) + L-1 [SI-A]-1 B U(s)
where L-1 [sI-A]-1 = ∅(t) = state transition matrix
[sI-A]-1 = ∅(s) = Resolvent matrix
The solution of state equation is,
X(t) = ∅(t) X(0) + L-1 [∅(s). B U(s)]](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-61-320.jpg)
![The output equation is,
y(t) = C x(t) + D u(t)
Taking Laplace transforms on both sides,
Y(s) = C X(s) + D U(s)
From equation (1), X(s) = [sI-A]-1 X(0) + [SI-A]-1 B U(s)
= C{[sI-A]-1 X(0) + [SI-A]-1 B U(s)} + D U(s)
= C[sI-A]-1 X(0) + C [SI-A]-1 B U(s) + D U(s)
For zero initial conditions, X(0) = 0
∴ Y(s) = C [SI-A]-1 B U(s) +D U(s)
= {C [SI-A]-1 B +D} U(s)
The transfer function =
Y(s)
U(s)
= C [SI-A]-1 B + D](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-62-320.jpg)
![Problem
A state variable description of a system is given
by the matrix equation,
ሶ
X =
−1 0
1 −2
X +
1
0
u
Y = [ 1 1] X
Find (i) The Transfer function
(ii) The State transition matrix
(iii) State diagram](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-63-320.jpg)
![Solution
The state model is given by
ሶ
X = A X + B U
Y = C X + D U
From the given problem,
A =
−1 0
1 −2
B =
1
0
C = [ 1 1]
(i) The transfer function =
Y(s)
U(s)
= C [SI-A]-1 B + D
Here D =0
∴
Y(s)
U(s)
= C [SI-A]-1 B](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-64-320.jpg)
![[sI-A] = s
1 0
0 1
-
−1 0
1 −2
=
s 0
0 s
-
−1 0
1 −2
=
s + 1 0
−1 s + 2
[SI-A]-1 =
Adj A
Det A
=
s + 2 0
1 s + 1
1
(s+1)(s+2)
Y(s)
U(s)
= C [SI-A]-1 B
= [1 1]
s + 2 0
1 s + 1
{
1
(s+1)(s+2)
}
1
0
= {
1
(s+1)(s+2)
} [1 1]
s + 2 0
1 s + 1
1
0](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-65-320.jpg)
![Y(s)
U(s)
= {
1
(s+1)(s+2)
} [1 1]
s + 2
1
= {
1
(s+1)(s+2)
} [s+3]
=
s+3
(s+1)(s+2)
(ii) State transition matrix = ∅(t) = L-1 [sI-A]-1
[SI-A]-1 =
s + 2 0
1 s + 1
1
(s+1)(s+2)
=
s+2
(s+1)(s+2)
0
(s+1)(s+2)
1
(s+1)(s+2)
s+1
(s+1)(s+2)](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-66-320.jpg)
![[SI-A]-1 =
1
(s+1)
0
1
(s+1)(s+2)
1
(s+2)
∅(t) = L-1 [sI-A]-1
= L-1
1
(s+1)
0
1
(s+1)(s+2)
1
(s+2)
= L-1
1
(s+1)
0
1
(s+1)
−
1
(s+2)
1
(s+2)
= e−t 0
e−t
− e−2t
e−2t](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-67-320.jpg)


![Problem
The state equation of a LTI system is given as
ሶ
x =
0 5
−1 −2
X +
1
1
u and y = [1 1] X
Determine (i) State transition matrix
(ii) The transfer function
(iii) State diagram](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-70-320.jpg)
![Solution
From the given system,
A =
0 5
−1 −2
B=
1
1
C= [1 1]
(i) The State transition matrix ,
∅(t) = L-1 [sI-A]-1
[sI – A] = s
1 0
0 1
-
0 5
−1 −2
=
s −5
1 s + 2
[sI-A]-1 =
s + 2 5
−1 s
1
s s+2 +5
=
s+2
s s+2 +5
5
s s+2 +5
−1
s s+2 +5
s
s s+2 +5](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-71-320.jpg)
![=
s+1+1
s+1 2
+22
5
s+1 2
+22
−1
s+1 2
+22
s
s+1 2
+22
∅(t) = L−1 [sI−A]−1
= L-1
s+1+1
s+1 2
+22
5
s+1 2
+22
−1
s+1 2
+22
s+1−1
s+1 2
+22
=
e−t cos 2t +
1
2
e−t sin 2t
5
2
e−t sin 2t
−
1
2
e−t sin 2t e−t cos 2t −
1
2
e−t sin 2t](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-72-320.jpg)
![(ii) The transfer function
Y(s)
U(s)
= C [SI-A]-1 B
= [1 1]
s + 2 5
−1 s
1
s s+2 +5
1
1
=
1
s s+2 +5
[1 1]
S + 7
S − 1
=
2S+6
s s+2 +5](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-73-320.jpg)


![Solution
From the given system,
A =
0 1 0
0 0 1
−1 −2 −3
; B =
0 0
1 0
0 1
;C =
1 0 0
0 0 1
[sI-A] = s
1 0 0
0 1 0
0 0 1
-
0 1 0
0 0 1
−1 −2 −3
=
s −1 0
0 s −1
1 2 s + 3](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-76-320.jpg)
![∴ [sI-A]-1 =
(s + 2)(s + 1) s + 3 1
−1 s(s + 3) s
−s −(2s + 1) s2
1
s3
+3s2
+2s+1
The transfer function of the system is given by
Y(s)
U(s)
= C [SI-A]-1 B
=
1 0 0
0 0 1
(s + 2)(s + 1) s + 3 1
−1 s(s + 3) s
−s −(2s + 1) s2
1
s3
+3s2
+2s+1
0 0
1 0
0 1
=
1 0 0
0 0 1
s + 3 1
s(s + 3) s
− 2s + 1 s2
1
s3
+3s2
+2s+1
=
s + 3 1
− 2s + 1 s2
1
s3
+3s2
+2s+1](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-77-320.jpg)

![Solution
From the given system, A =
1 0
1 1
The solution of state equation is,
X(t) = L-1 [sI-A]-1 X(0) + L-1 [SI-A]-1 B U(s)
Here U= 0
∴ X(t) = L-1 [sI-A]-1 X(0)
[sI – A] = s
1 0
0 1
-
1 0
1 1
=
s − 1 0
−1 s − 1
[sI-A]-1 =
s − 1 0
1 s − 1
1
s−1 2](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-80-320.jpg)
![[sI-A]-1 =
s − 1 0
1 s − 1
1
s−1 2
=
1
s−1
0
1
s−1 2
1
s−1
X(t) = L-1 [sI-A]-1 X(0)
= L-1
1
s−1
0
1
s−1 2
1
s−1
1
0
= et
0
tet
et
1
0
= et
tet](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-81-320.jpg)
![Solution of state equation (Time Domain)
ሶ
x(t) = A x(t) + B u(t) X(0) = x0
ሶ
x(t) - A x(t) = B u(t)
pre-multiplying both sides by e−At
e−At[ ሶ
x(t) - A x(t)] = e−At B u(t) ----------------(1)
Consider,
𝑑
𝑑𝑡
{e−At x(t)} = e−At ሶ
x(t) - A e−At x(t)]
= e−At
[ ሶ
x(t) - A x(t)]
∴ equation (1) =
𝑑
𝑑𝑡
{e−At
x(t)} = e−At
B u(t)
Integrating with respect to t
0
t d
dt
{e−At x(t)} dt = 0
t
[e−Aτ B u(τ)]dτ
e−At x(t) – x(0) =
0
𝑡
[e−Aτ B u(τ)]d𝜏](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-82-320.jpg)
![Pre-multiplying both sides by eAt,
eAt
[e−At
x(t) – x(0)] = eAt
[0
𝑡
e−Aτ
B u(τ)d𝜏]
x(t) = eAt
[x(0) + 0
t
e−Aτ
B u(τ)dτ]
= eAt
x(0) + 0
t
[eA(t−τ) B u(τ)]dτ
x(t) = ∅ t x(0) + 0
t
∅(t−τ) B u(τ) dτ
if the initial time is t = t0, the solution of state equation
becomes,
x(t) = ∅ t − t0 x(t0) + 0
t
∅(t−τ) B u(τ)dτ](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-83-320.jpg)
![Properties of state transition matrix
∅(t) = eAt = L-1 [sI-A]-1
1. ∅(0) = I
2. ∅-1(t) = ∅(-t)
3. ∅(t2-t1) ∅(t1-t0) = ∅(t2-t0) for any t2, t1, t0
4. [∅(t)]k = ∅(kt)
5. ∅(t1+t2) = ∅(t1) ∅(t2) = ∅(t2) ∅(t1)](https://image.slidesharecdn.com/statespaceanalysis-230619043131-1e93c229/85/STATE_SPACE_ANALYSIS-pdf-84-320.jpg)

































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)



