Download as PDF, PPTX

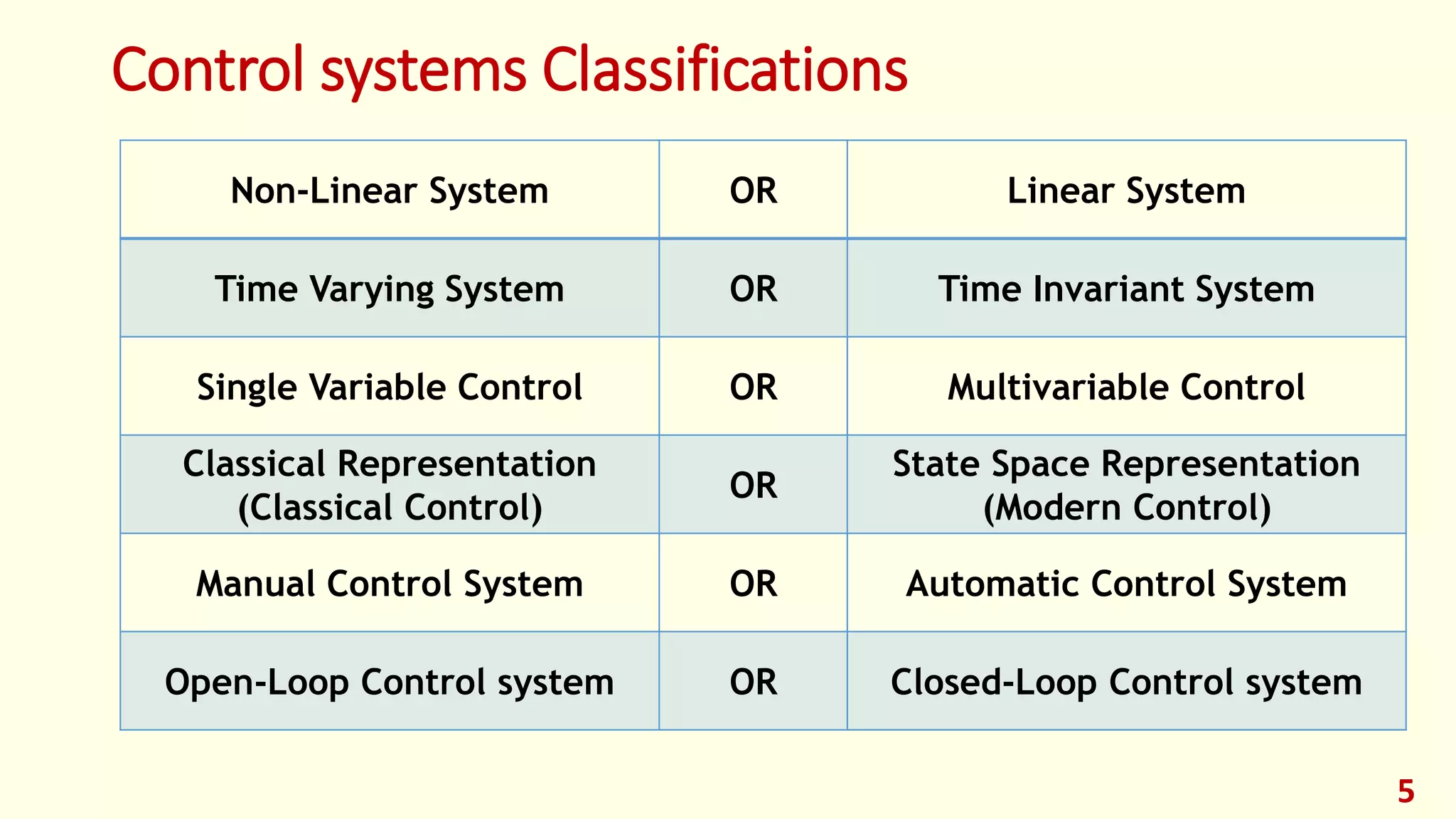
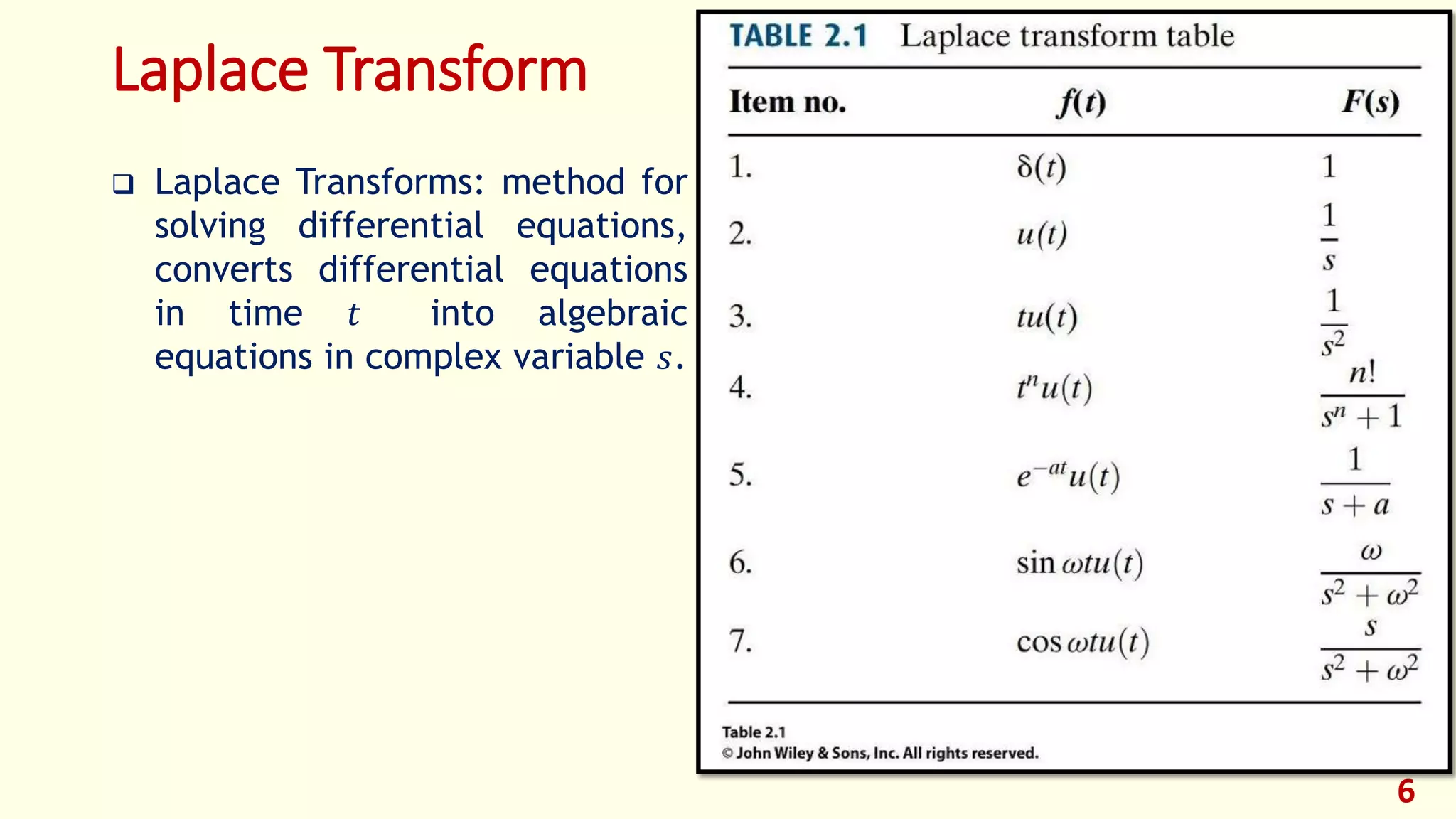














































This document provides an overview of mathematical modeling of physical systems. It discusses how to derive mathematical models from physical systems using differential equations based on governing physical laws. The key steps are: (1) defining the physical system, (2) formulating the mathematical model using differential equations, and (3) solving the equations. Common model types include differential equation, transfer function, and state-space models. The document also discusses modeling various physical elements like electrical circuits, mechanical translational/rotational systems, and electro-mechanical systems using differential equations. It covers block diagram representation and reduction of mathematical models. The overall goal is to realize the importance of deriving accurate mathematical models for analyzing and designing control systems.












































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)













