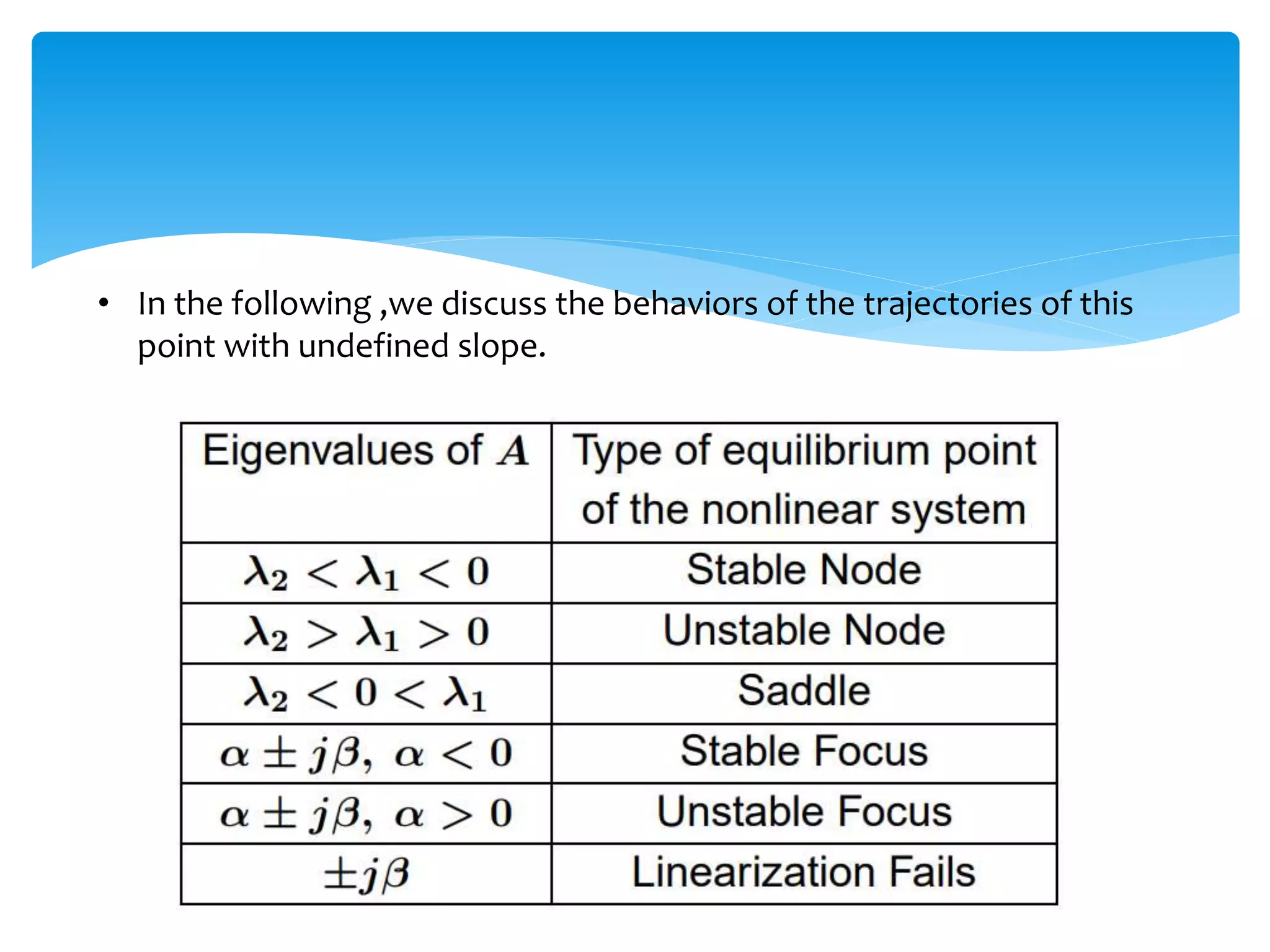
The document discusses different types of singular points in control systems:
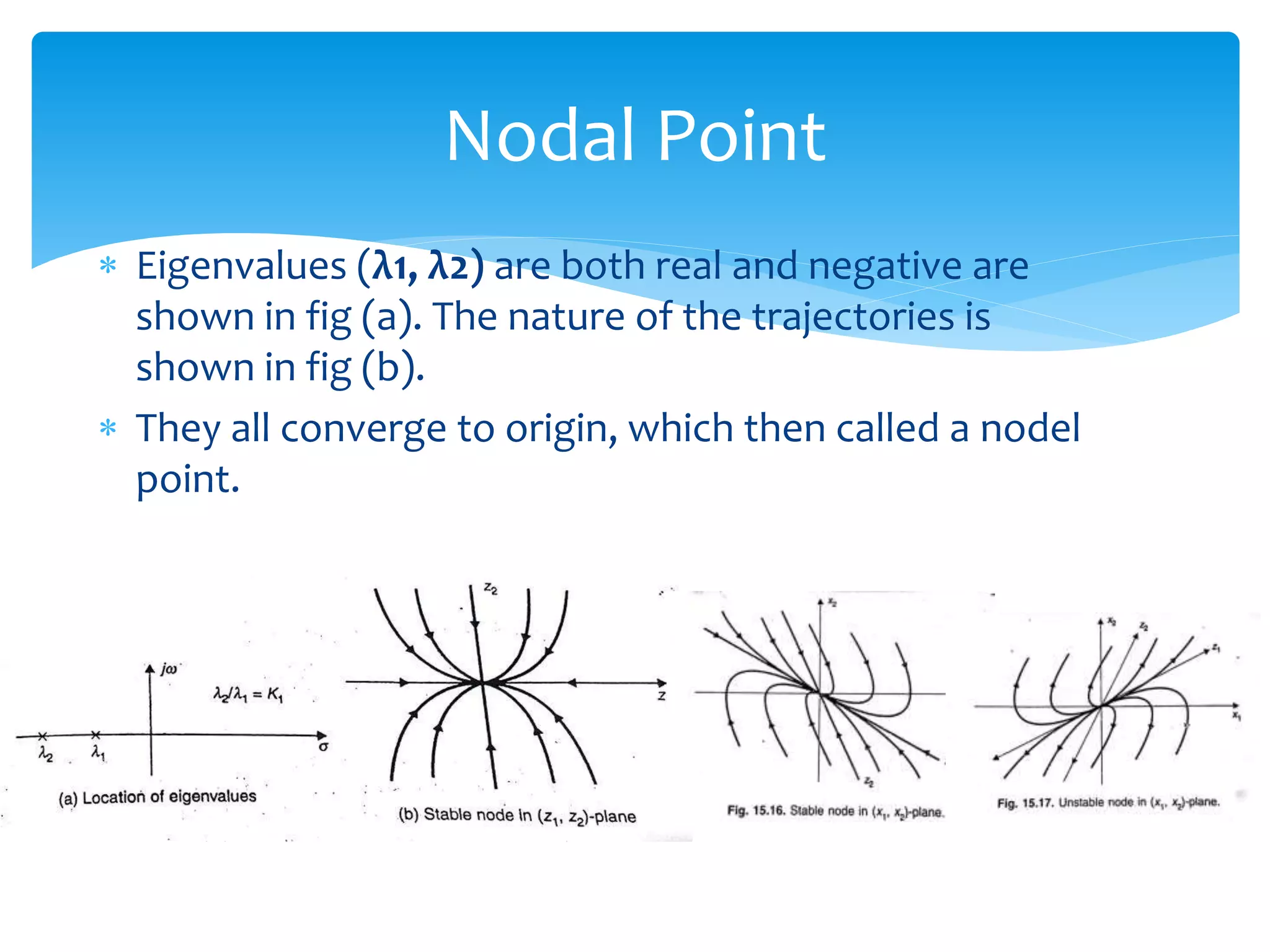
1. A nodal point occurs when both eigenvalues are real and negative, causing all trajectories to converge to the origin in a stable manner.
2. A saddle point occurs when the eigenvalues are real and equal but opposite in sign, making the origin unstable with some trajectories converging and others diverging.
3. A focus point occurs when the eigenvalues are complex conjugates with negative real parts, causing the trajectories to spiral inward in a stable manner towards the origin.
4. A center or vortex point occurs when the eigenvalues are purely imaginary, causing the trajectories to travel in closed paths around the origin in a limitedly stable manner.

![ A singular point is an equilibrium point in the phase
plane.
Since an equilibrium point is defined as a point where the
system states can stay forever, this implies that ẋ = 0 .
Consider a general time invariant system described by
the state equation
ẋ = f(x,u) …[1 ]
SINGULAR POINT](https://image.slidesharecdn.com/act44-170410170926/75/SINGULAR-POINT-IN-NON-LINEAR-SYSTEM-2-2048.jpg)
![ If the input vector u is constant, it is possible to write the
above equation in the form
ẋ = F(X) …[2]
A system represented by an equation of this form is called
autonomous system.
For such system, consider the points in the phase-space at
which the derivate of the all state variable are zero. Such
points are called singular points.](https://image.slidesharecdn.com/act44-170410170926/75/SINGULAR-POINT-IN-NON-LINEAR-SYSTEM-3-2048.jpg)