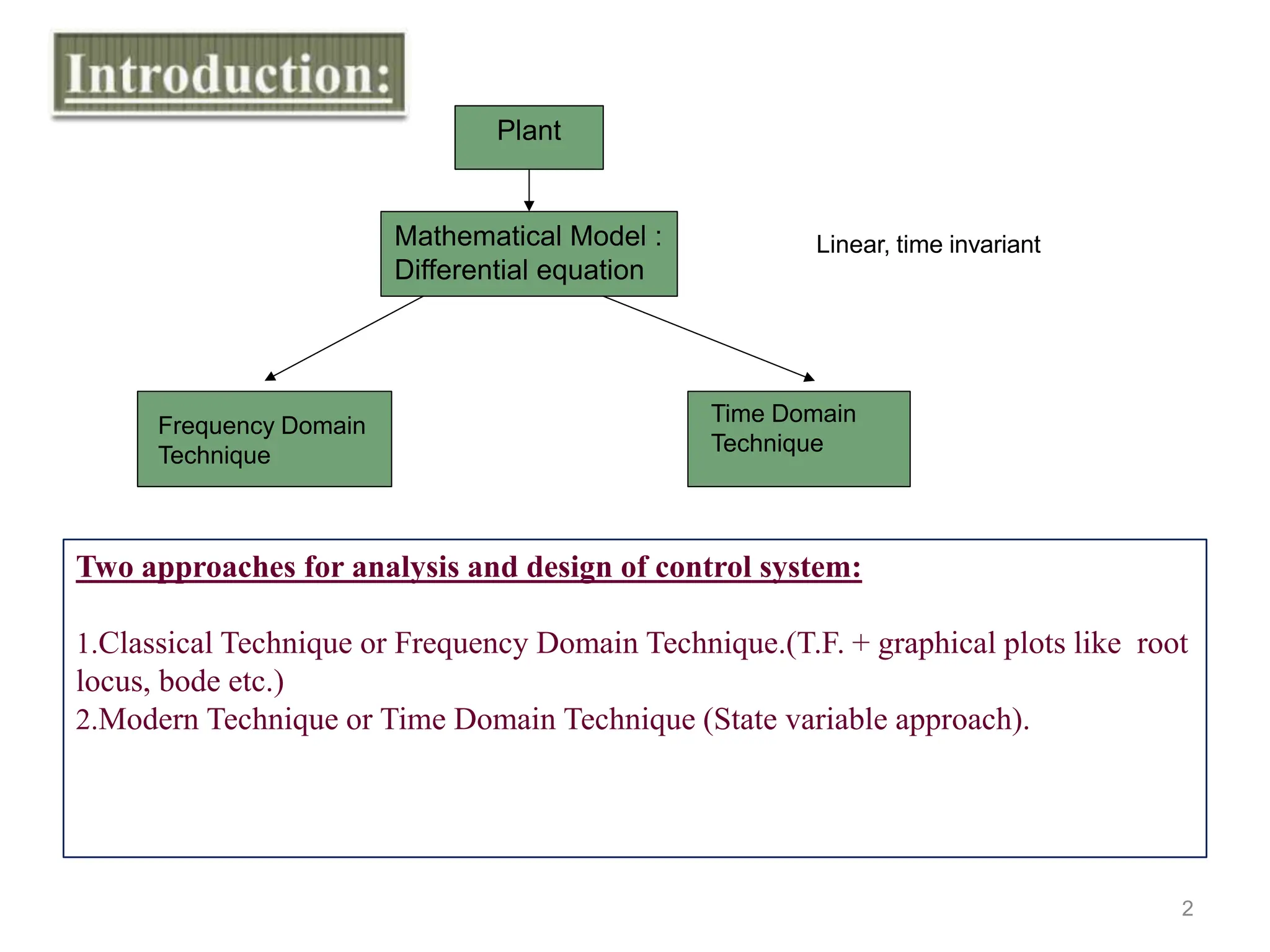
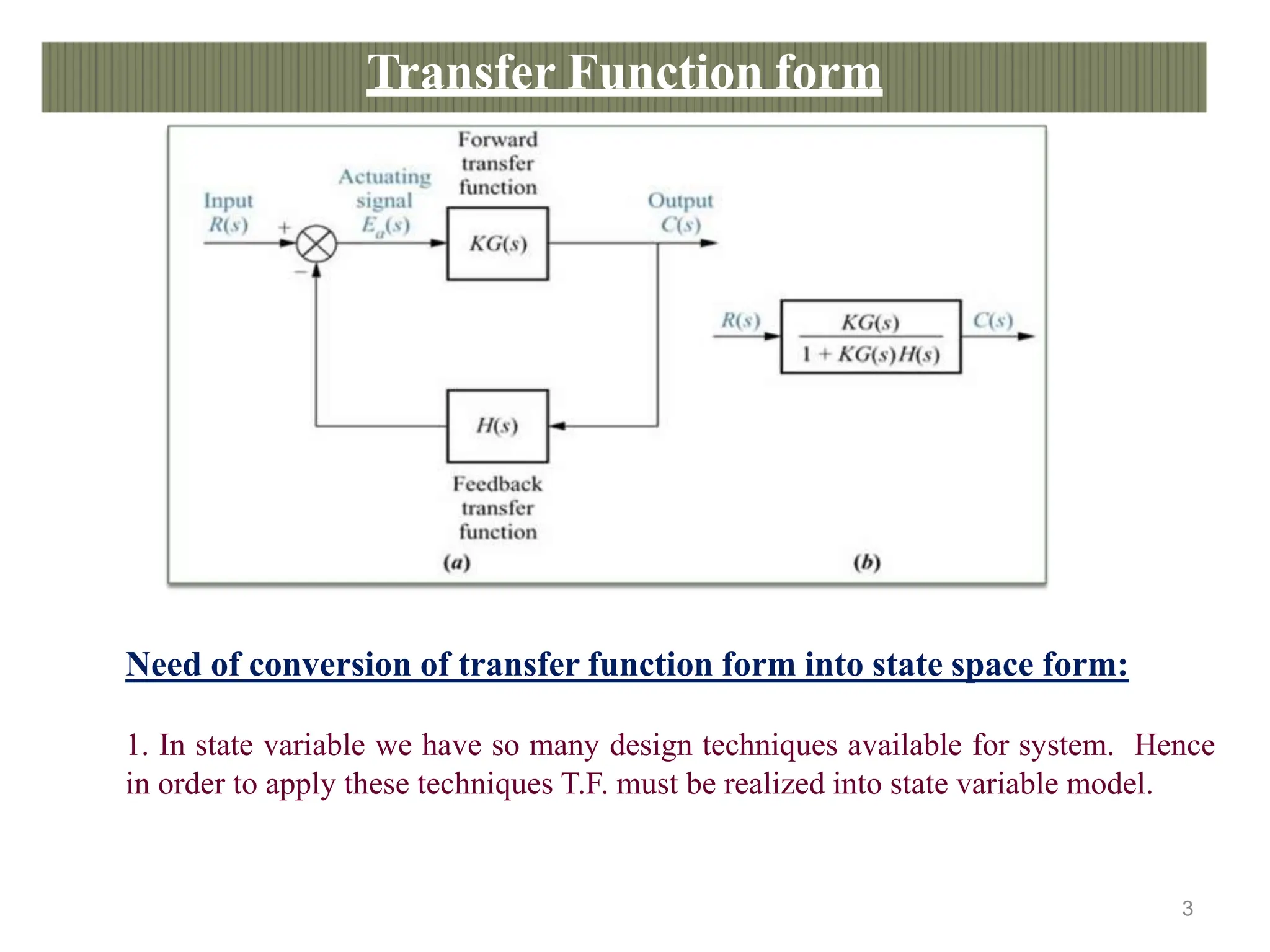
1. There are two main approaches for analyzing and designing control systems: the classical/frequency domain technique using transfer functions and the modern/time domain technique using state-space models.
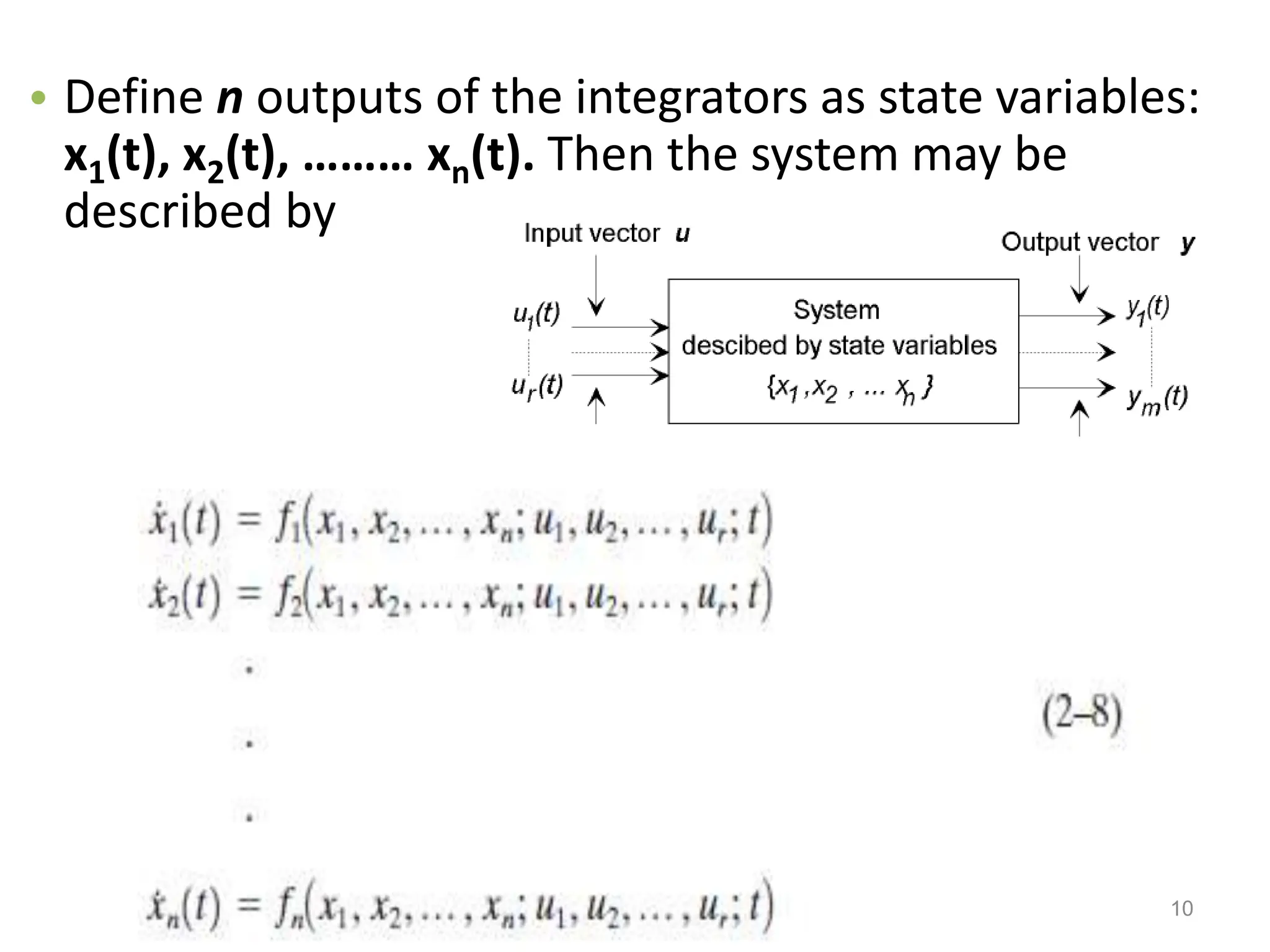
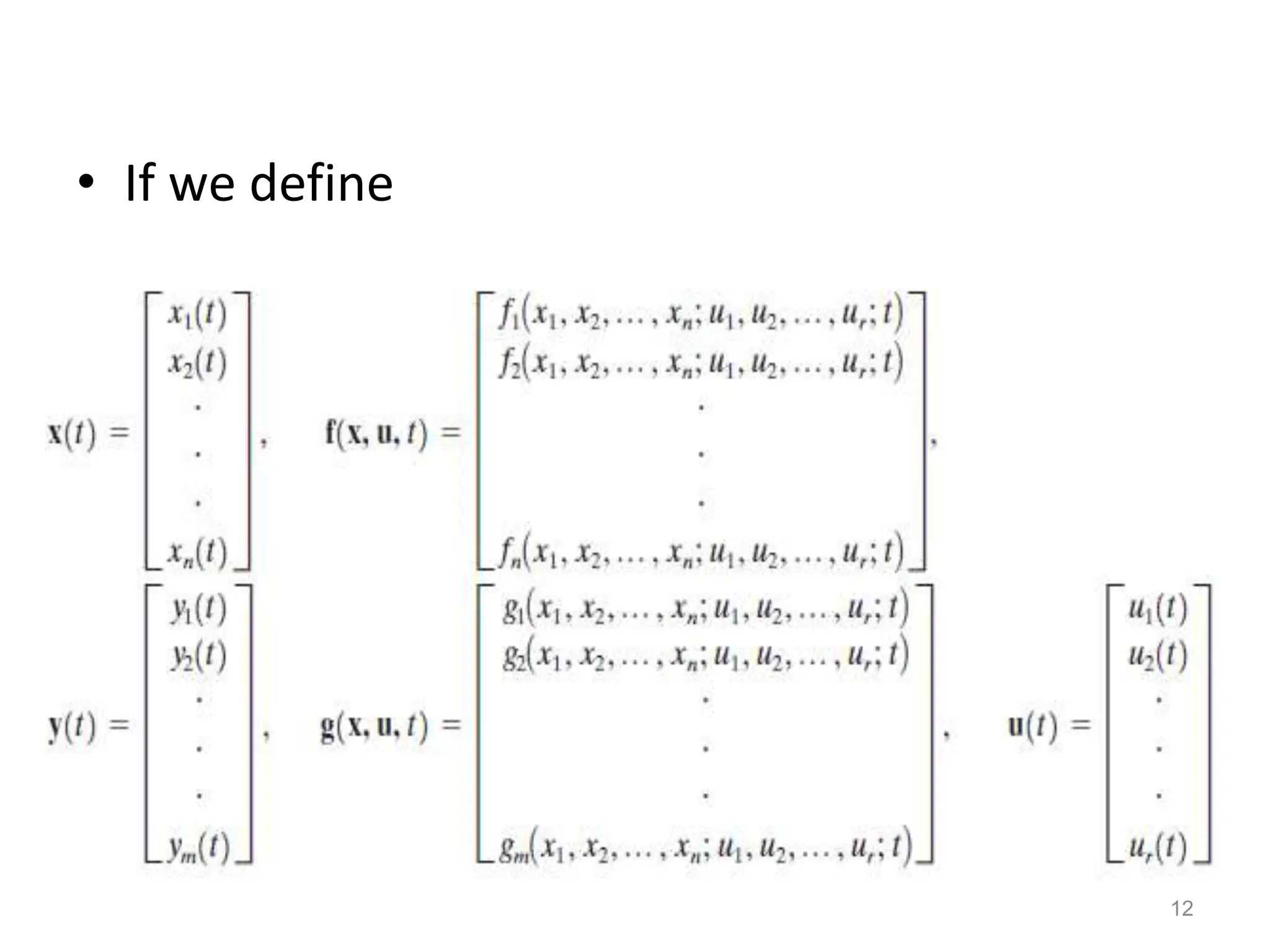
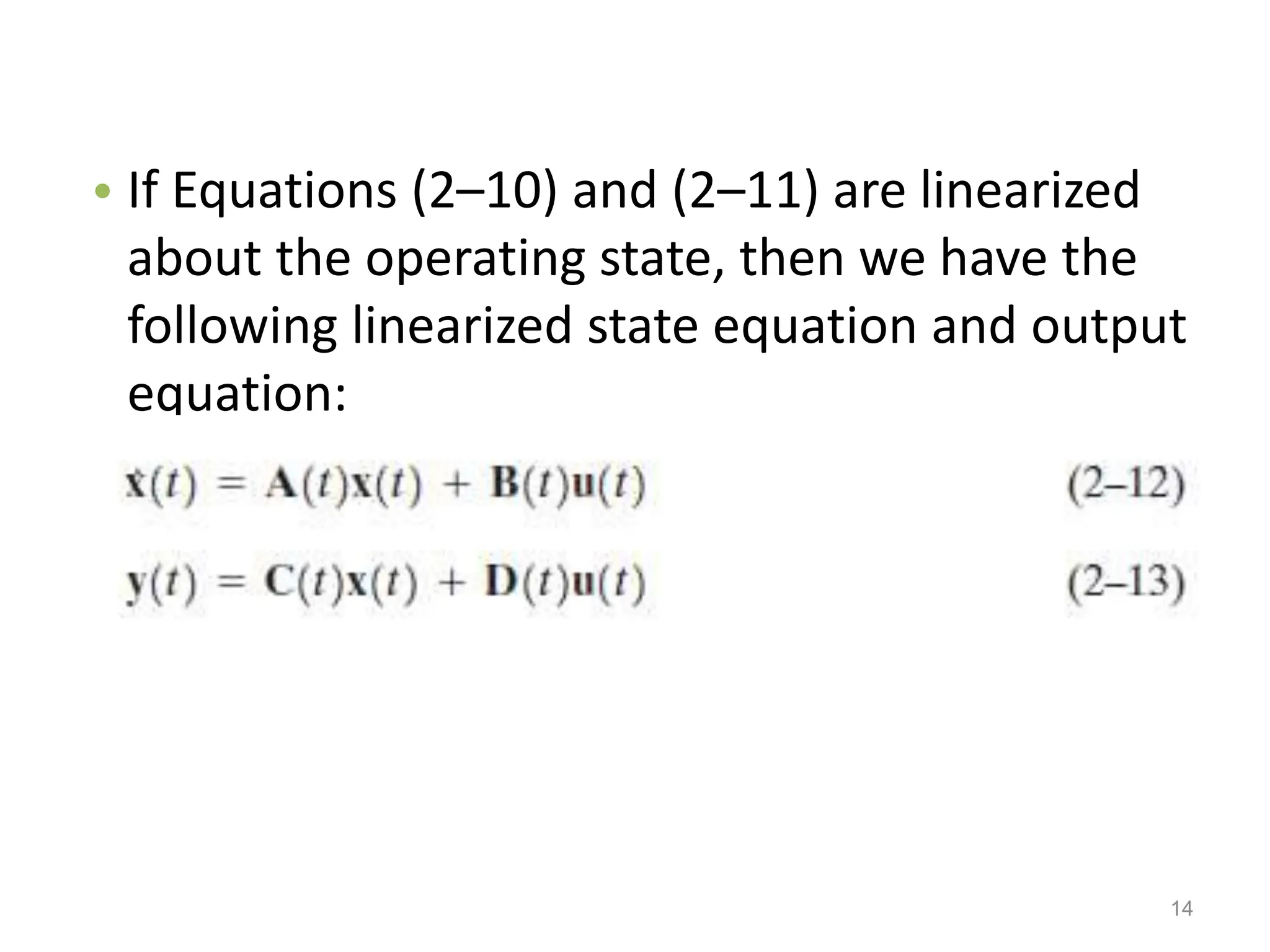
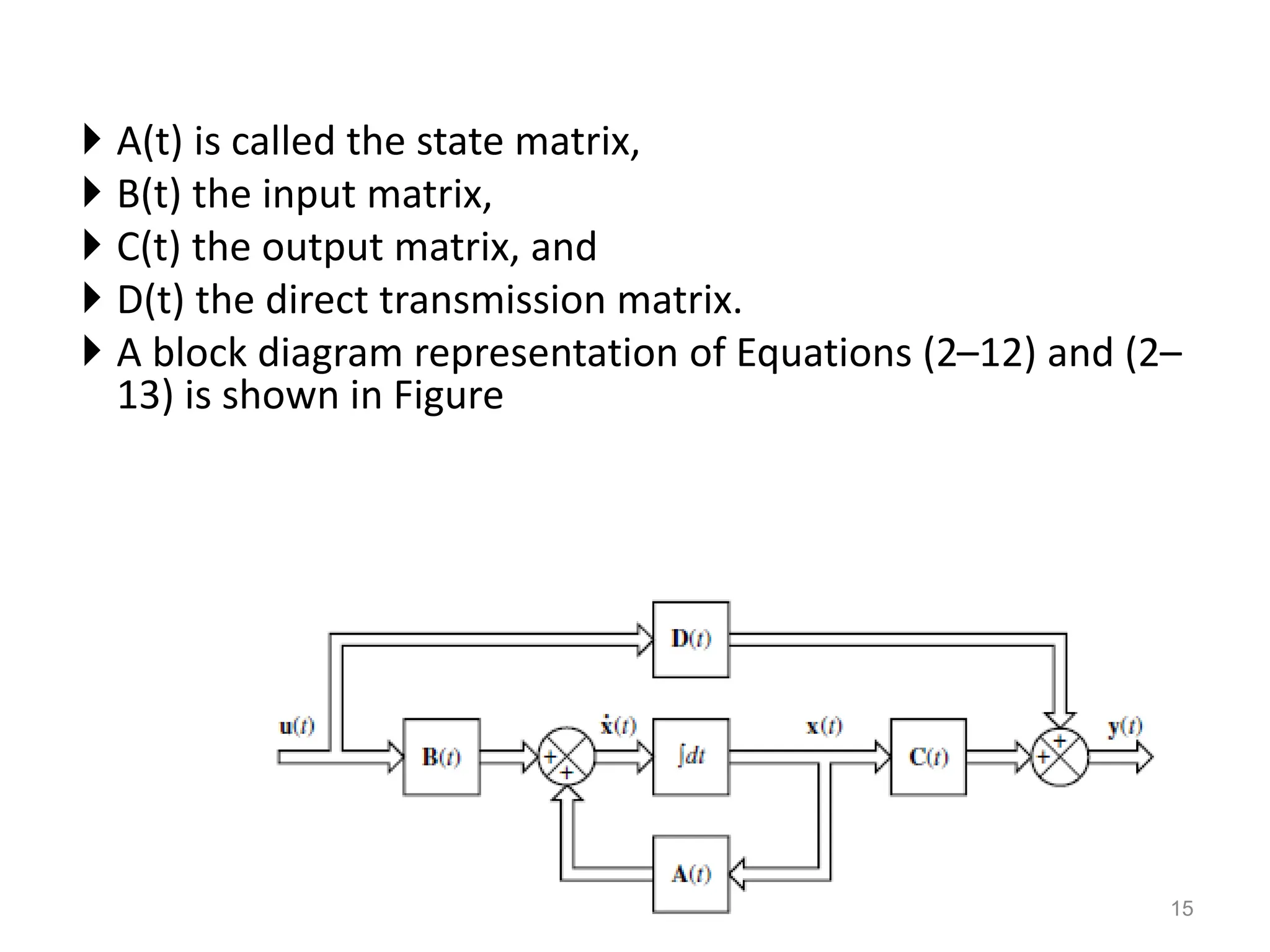
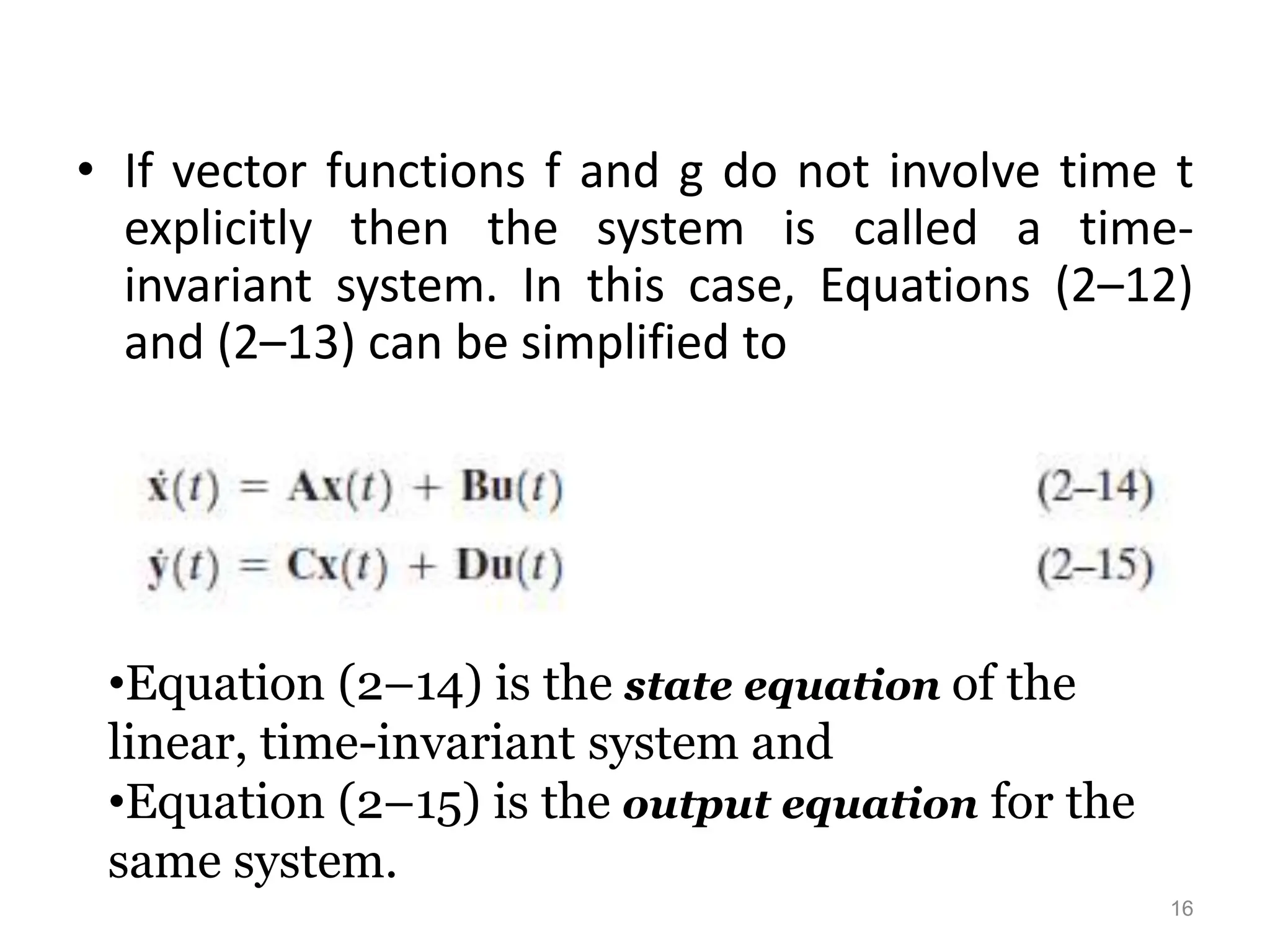
2. State-space models represent a system using matrices and vectors of input, output, and state variables related by first-order differential equations. This allows analysis of systems with multiple inputs and outputs and knowledge of internal states.
3. A state-space model defines state variables that contain the minimum information needed to describe the system behavior. The state-space is an n-dimensional space with axes defined by the state variables.