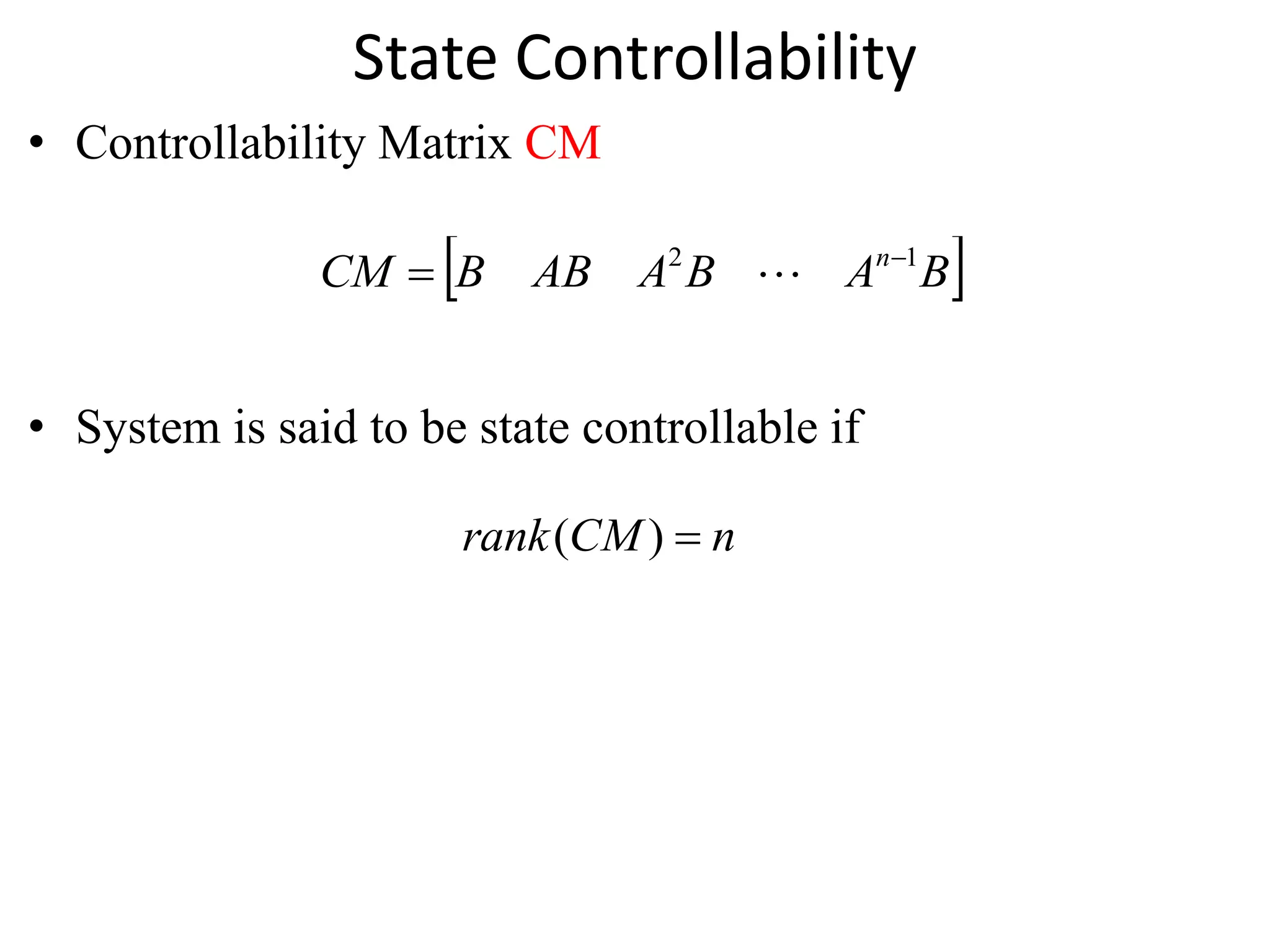
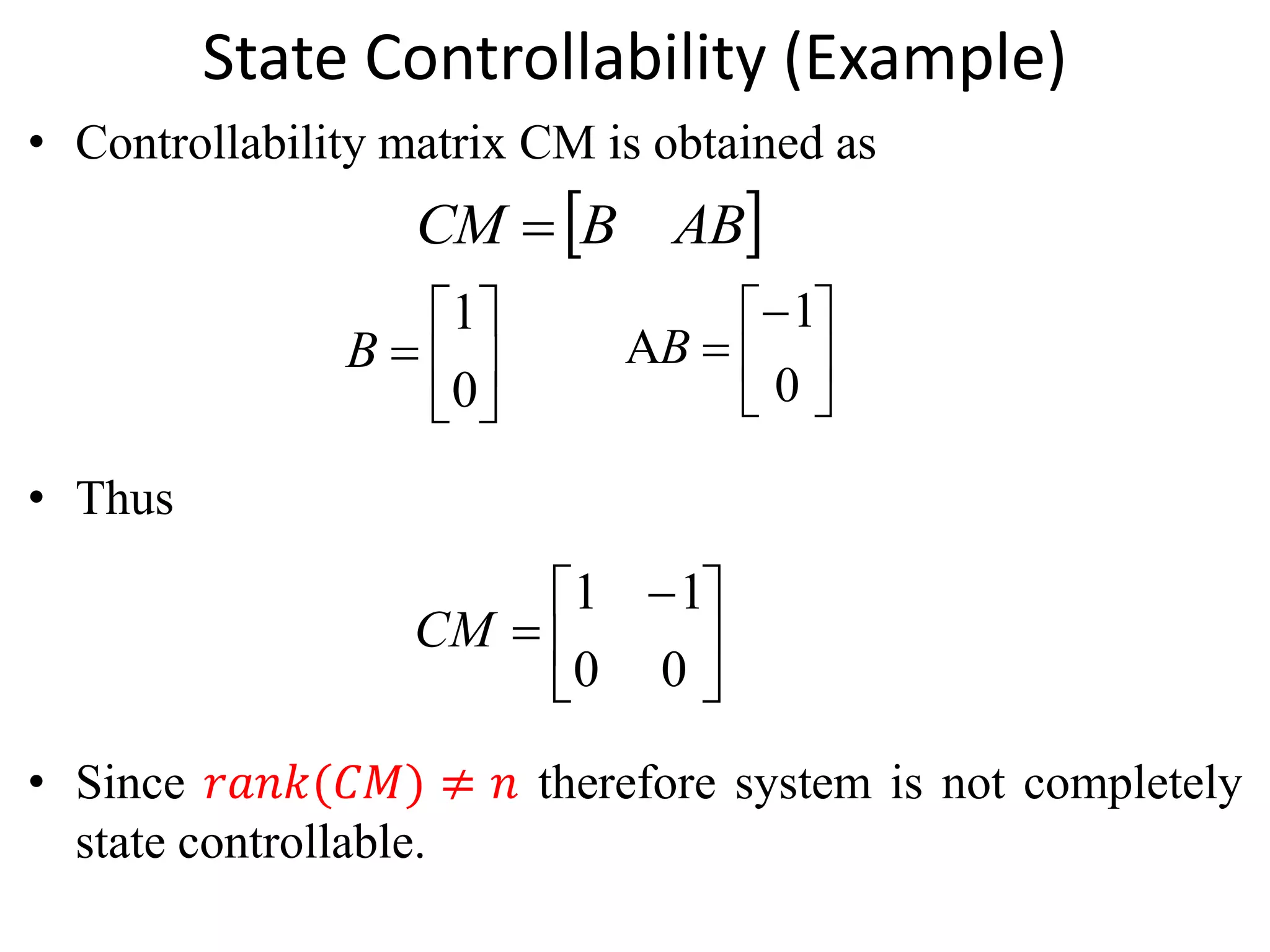
This document provides an introduction to state space modeling and analysis in modern control systems. It defines key concepts such as state, state variables, state vector, and state space. The document describes how to represent dynamic systems using state space equations involving state variables, input variables, output variables, and state vectors. It provides examples of modeling a mechanical system and DC motor in state space form. It also discusses the concept of state controllability and how to determine if a system is completely controllable using the controllability matrix.