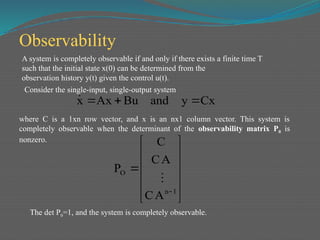
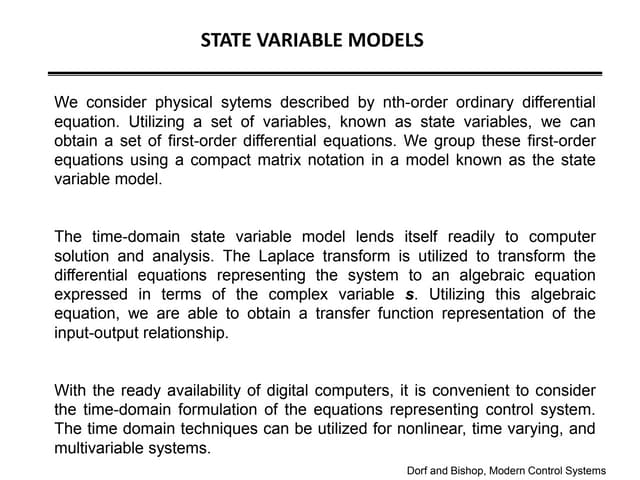
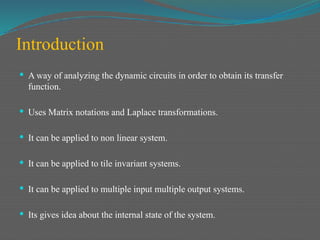
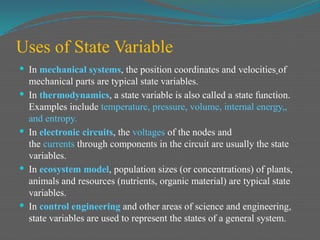
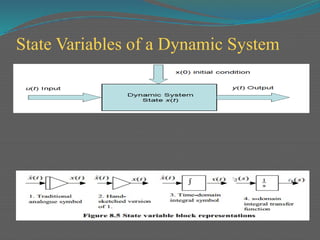
The document discusses state variable analysis as a method to analyze dynamic circuits and obtain their transfer functions using matrix notations and Laplace transformations. It covers the application of state variables in various systems, including mechanical, thermodynamic, electronic, and ecological systems, and elaborates on concepts like state space, state variables, and their relationships with controllability and observability in control systems. It also includes MATLAB code examples for modeling state-space representations of systems.

![We can write the equations as a set of two first order differential
equations in terms of the state variables x1 [vC(t)] and x2 [iL(t)] as
follows:
2
1
2
2
1
x
L
R
x
L
1
dt
dx
)
t
(
u
C
1
x
C
1
dt
dx
L
c
i
)
t
(
u
dt
dv
C
c
L
L
v
i
R
dt
di
L
The output signal is then 2
0
1 x
R
)
t
(
v
)
t
(
y
Utilizing the first-order differential equations and the initial
conditions of the network represented by [x1(t0) x2(t0)], we can
determine the system’s future and its output.](https://image.slidesharecdn.com/statevariableanalysis-240804044512-f82986cc/85/PPT-on-STATE-VARIABLE-ANALYSIS-for-Engineering-pptx-7-320.jpg)


![For instance, consider the third-order system
6
s
16
s
8
s
6
s
8
s
2
)
s
(
R
)
s
(
Y
)
s
(
G 2
3
2
We can obtain a state-space representation using the ss function. The
state-space representation of the system given by G(s) is
num=[2 8 6];den=[1 8 16 6];
sys_tf=tf(num,den)
sys_ss=ss(sys_tf)
Matlab code
0
D
and
75
.
0
1
1
C
0
0
2
B
,
0
1
0
0
0
4
5
.
1
4
8
A
](https://image.slidesharecdn.com/statevariableanalysis-240804044512-f82986cc/85/PPT-on-STATE-VARIABLE-ANALYSIS-for-Engineering-pptx-12-320.jpg)