Downloaded 520 times
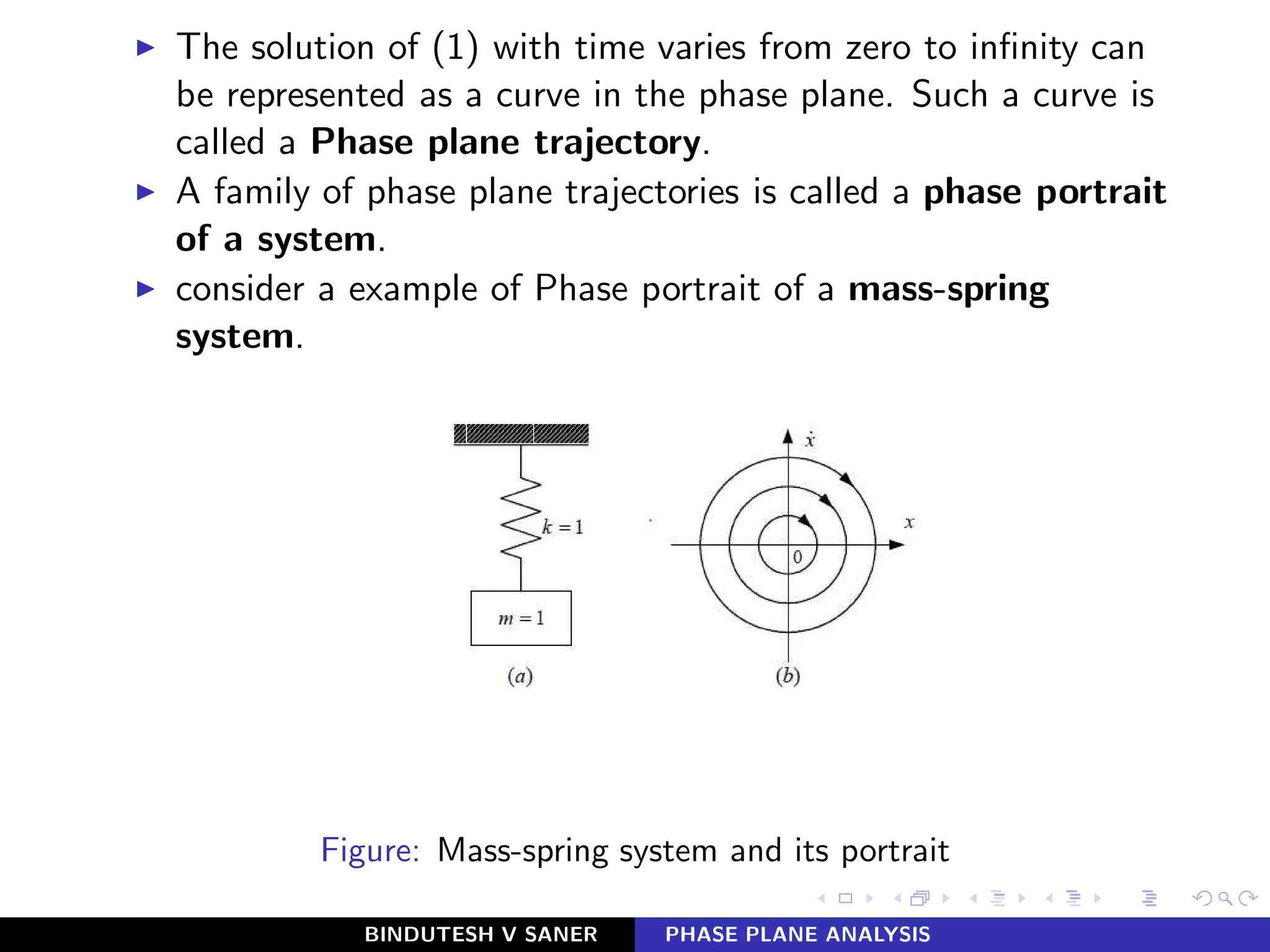
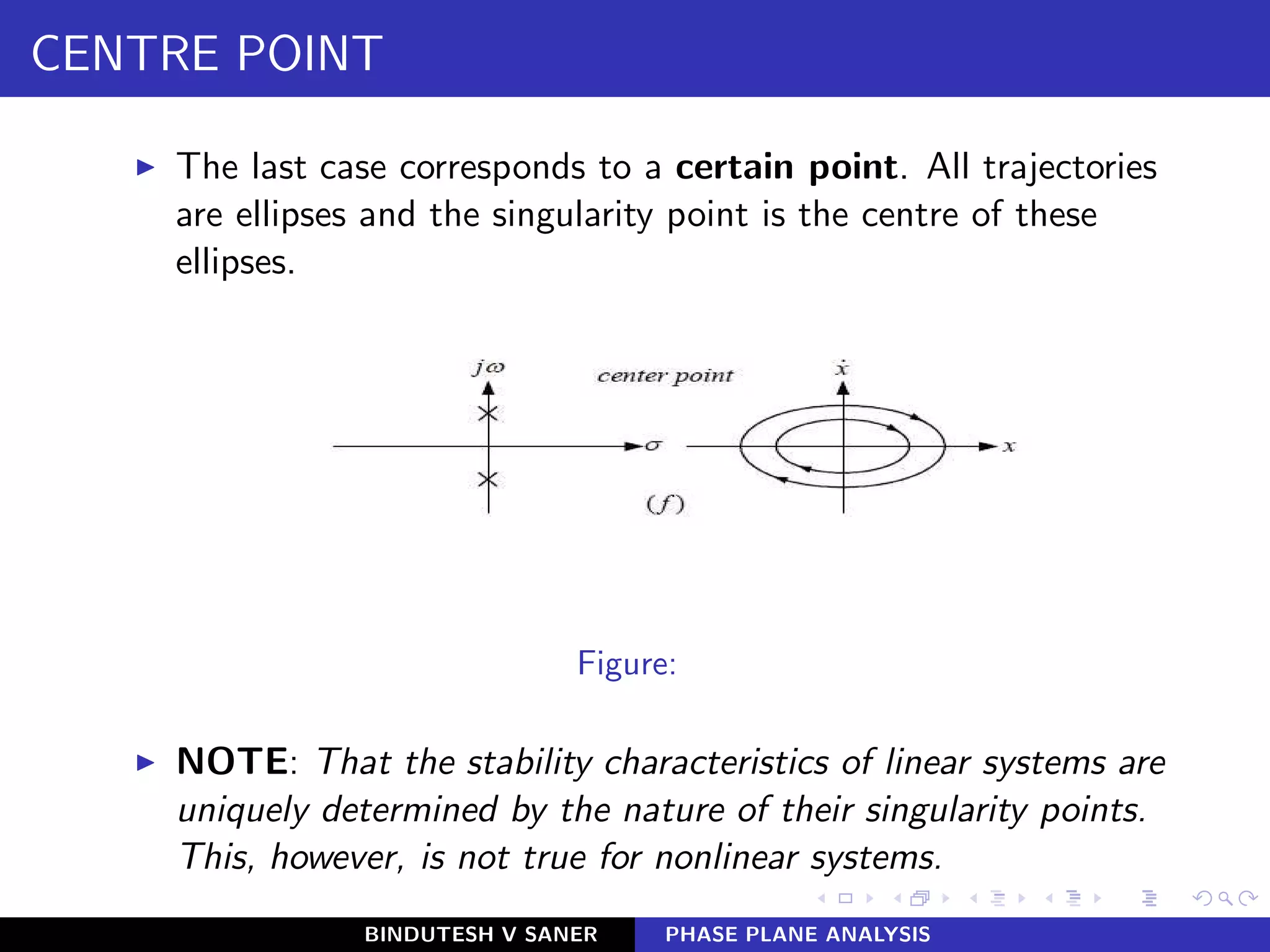
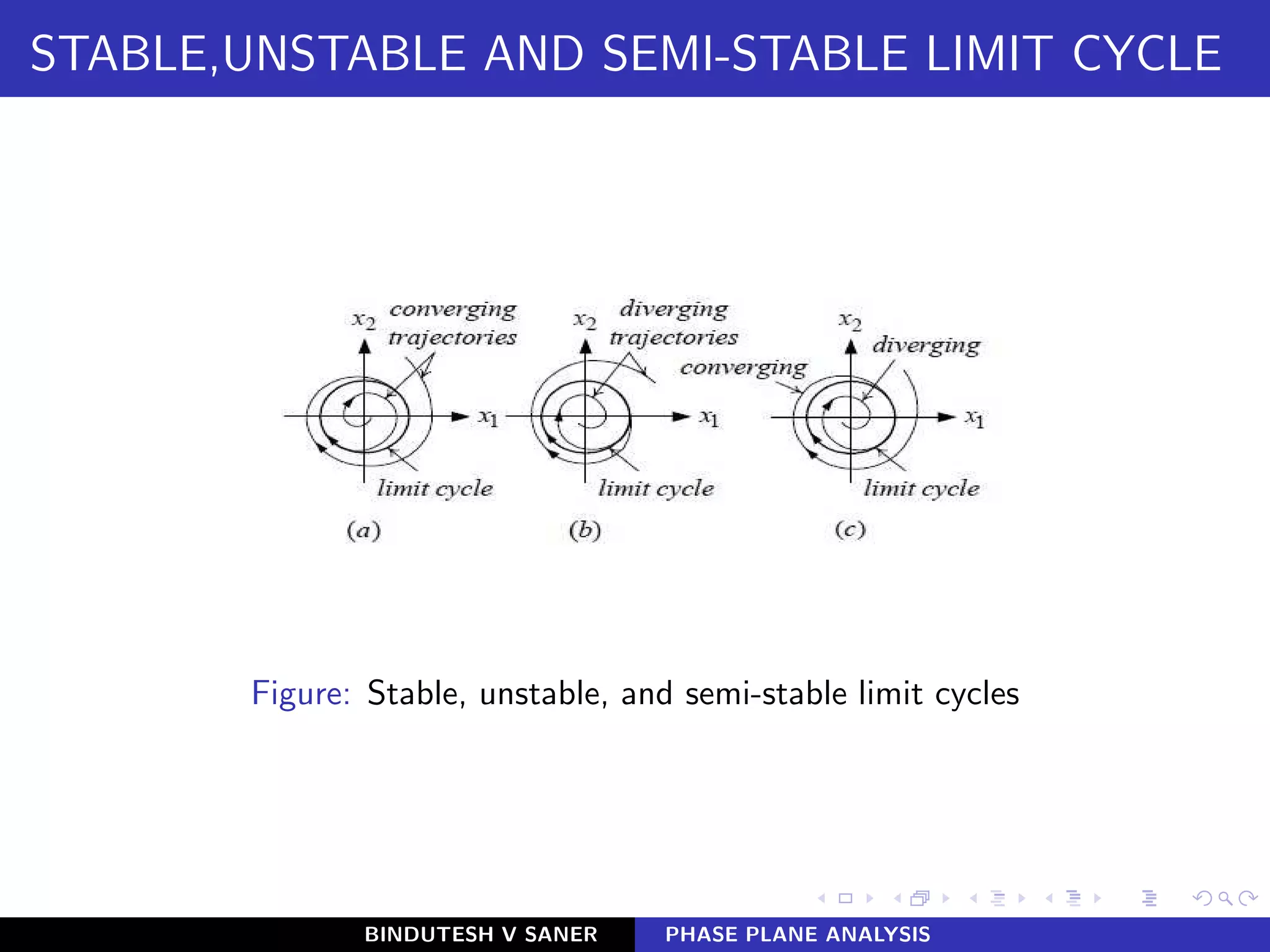

The document discusses phase plane analysis, a graphical method for studying second-order nonlinear systems. It describes phase portraits, singular points, limit cycles, and how to analyze linear and nonlinear systems using the phase plane. Phase plane analysis allows qualitative study of a nonlinear system's behavior from various initial conditions without analytical solutions. While restricted to second-order systems, it provides visualization of trajectories in the phase plane and applies to strong nonlinearities.





























































