Downloaded 76 times

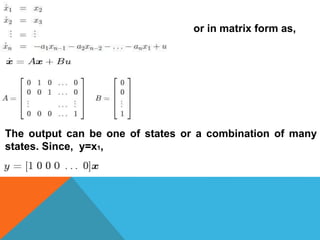
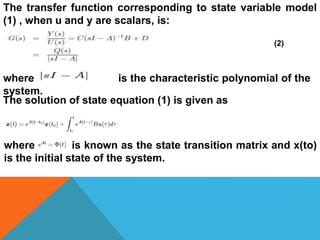
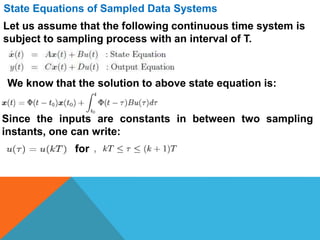
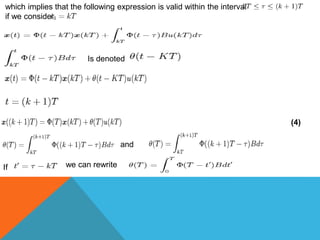
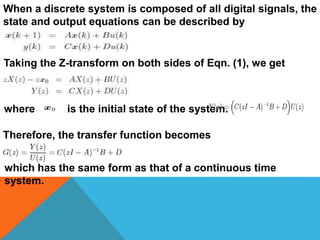
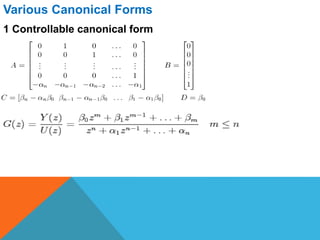
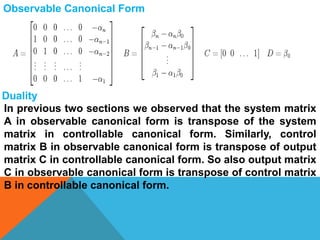
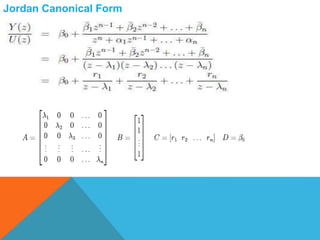
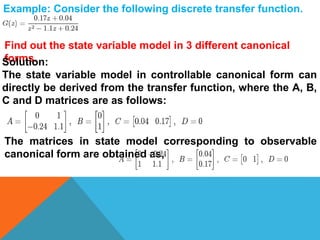
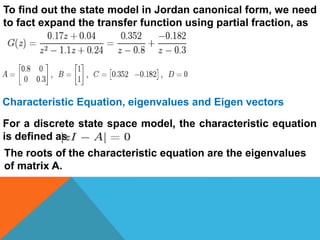
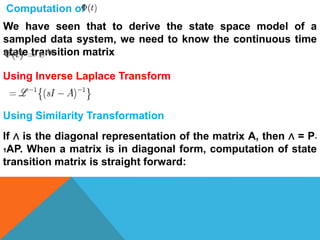
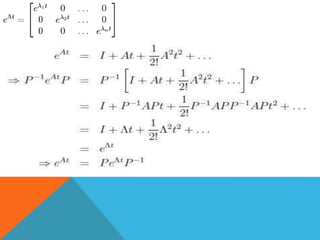
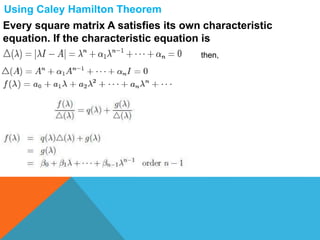
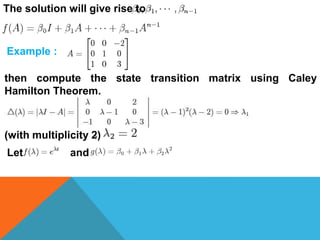
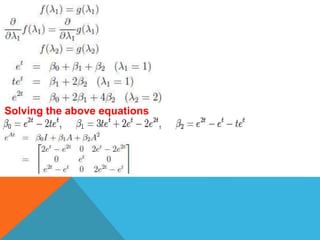
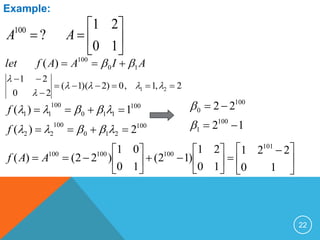
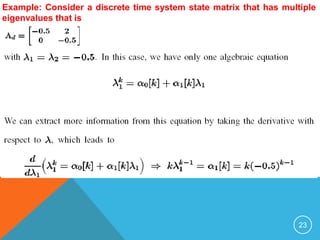



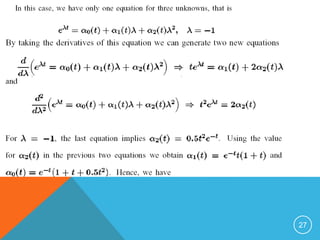
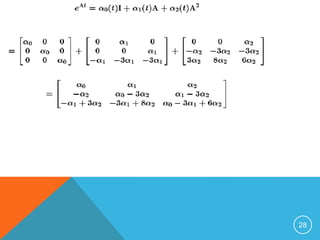
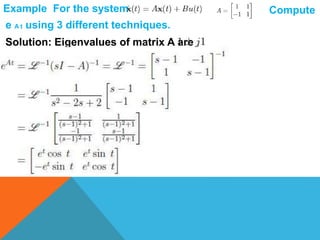
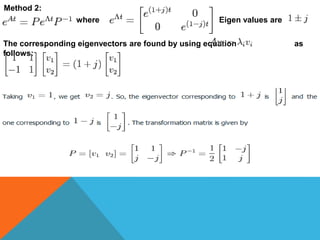
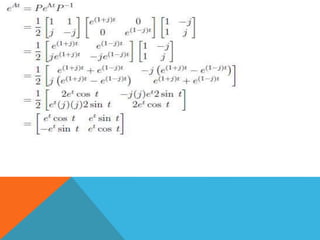

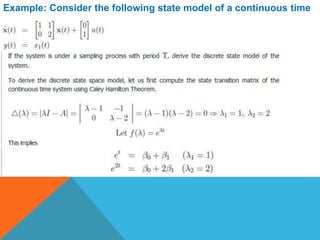
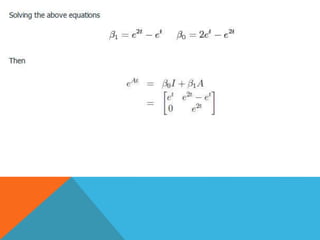
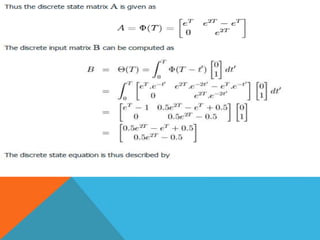
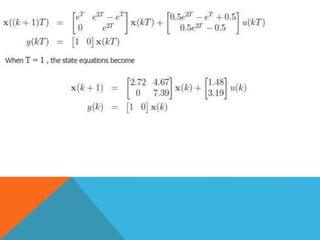
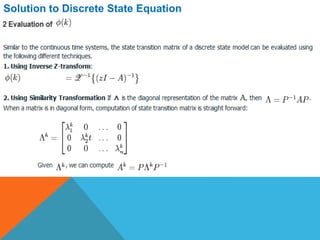
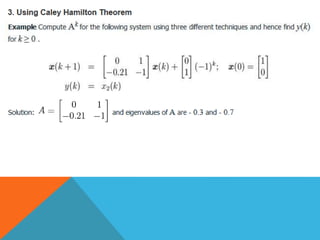
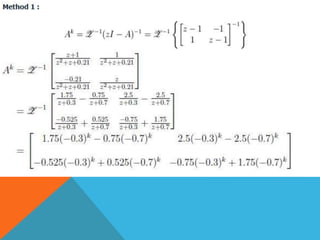
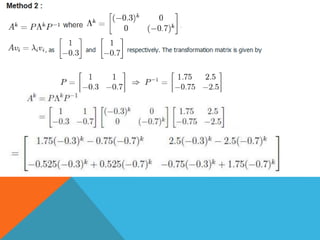
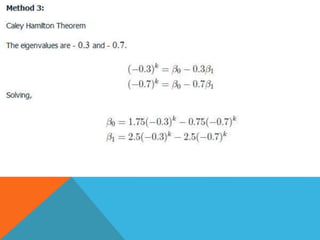
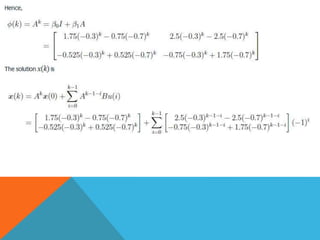
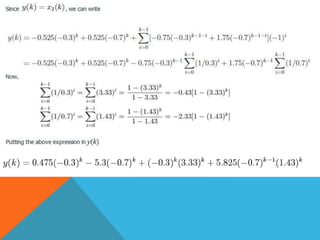
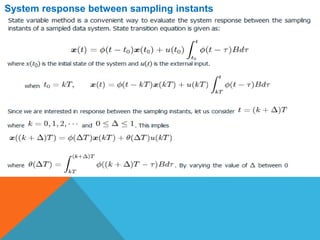
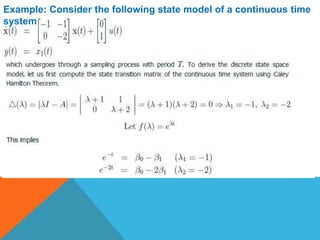
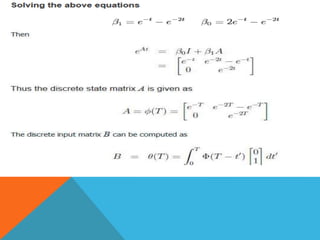
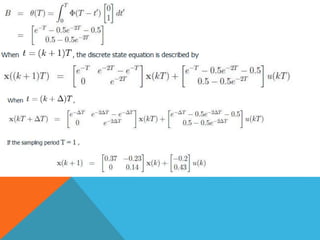
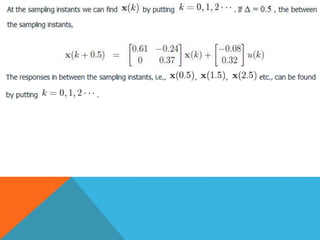
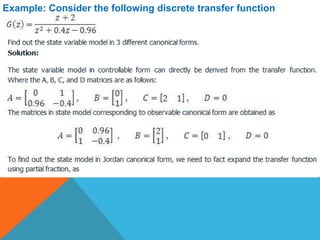



This document discusses discrete state space models. It begins with an introduction to state variable models and their generic structure. It then discusses various canonical forms for state space models including controllable, observable, and Jordan canonical forms. It also covers computing the characteristic equation, eigenvalues, state transition matrices using different techniques like inverse Laplace transform, similarity transformations, and Cayley-Hamilton theorem. Examples are provided to illustrate finding state space models from transfer functions and computing the state transition matrix.



































































