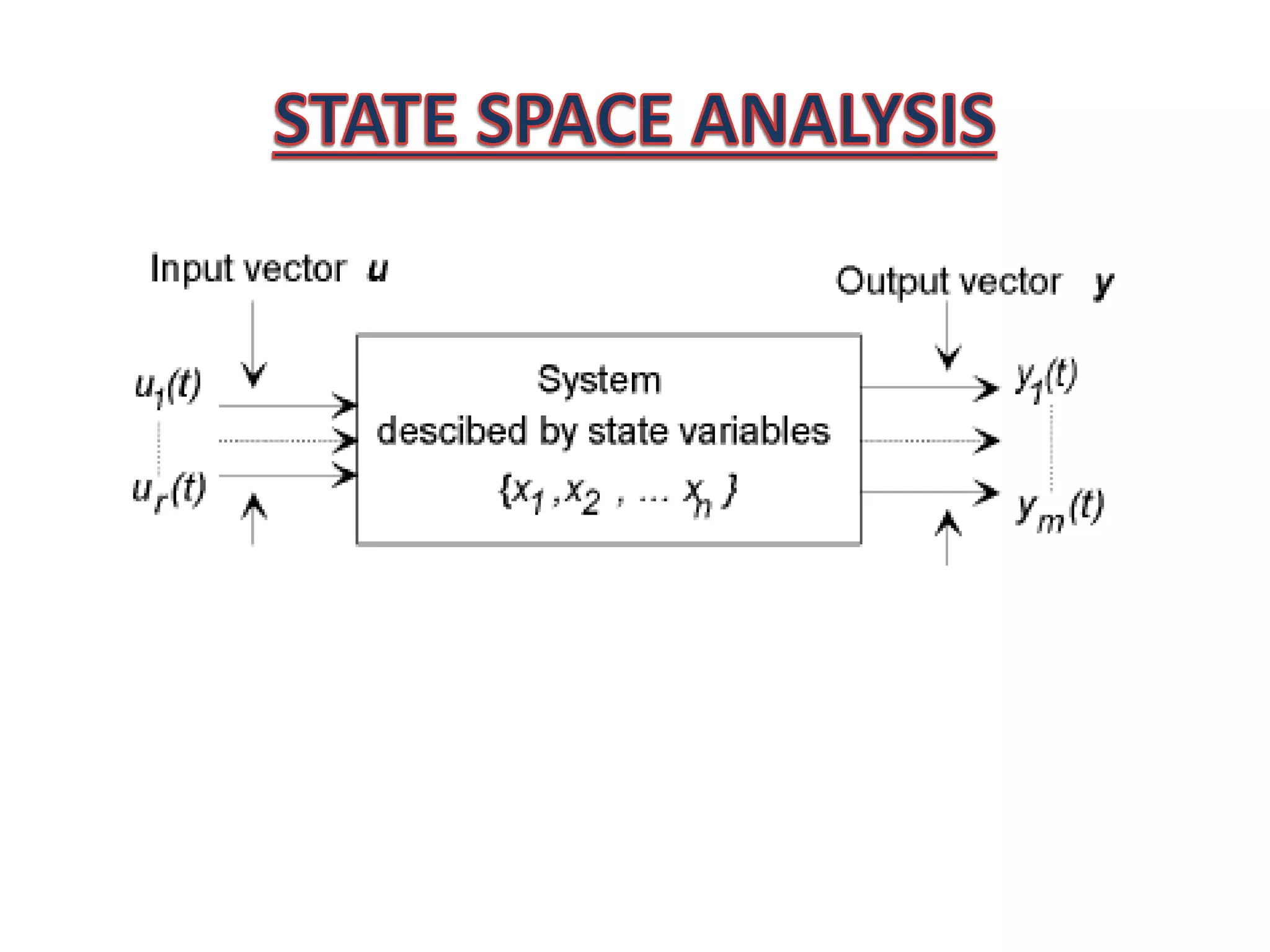
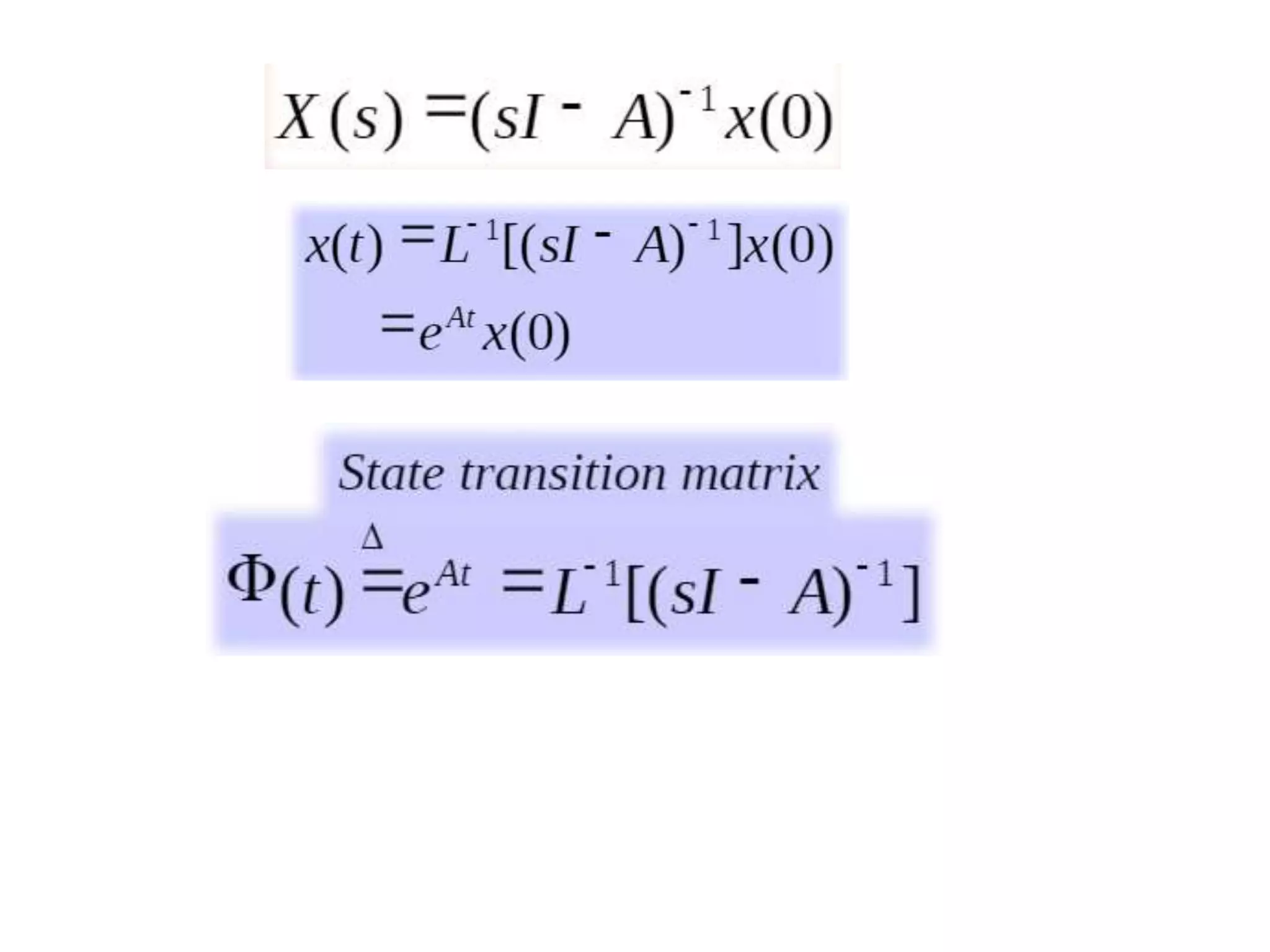
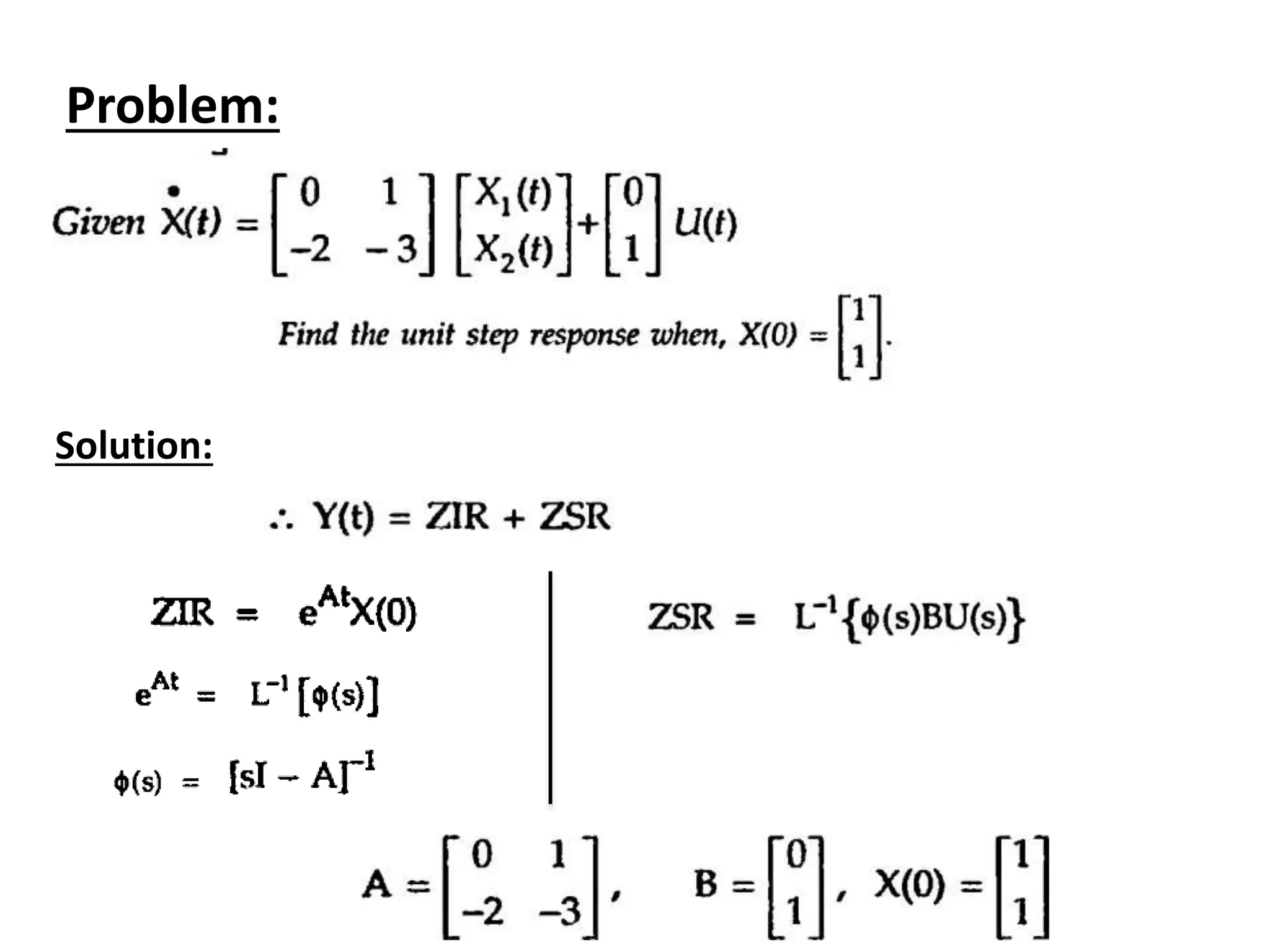
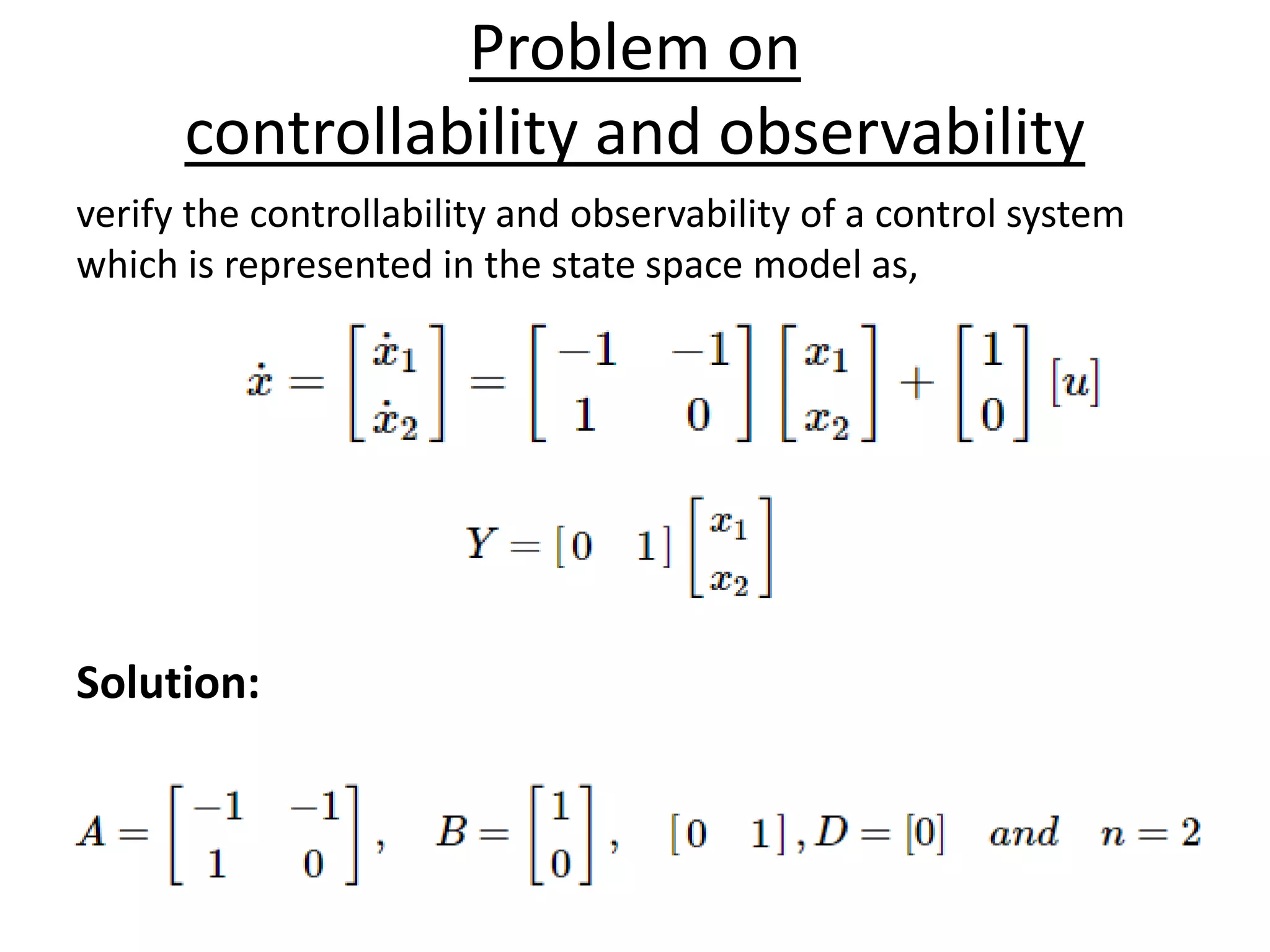
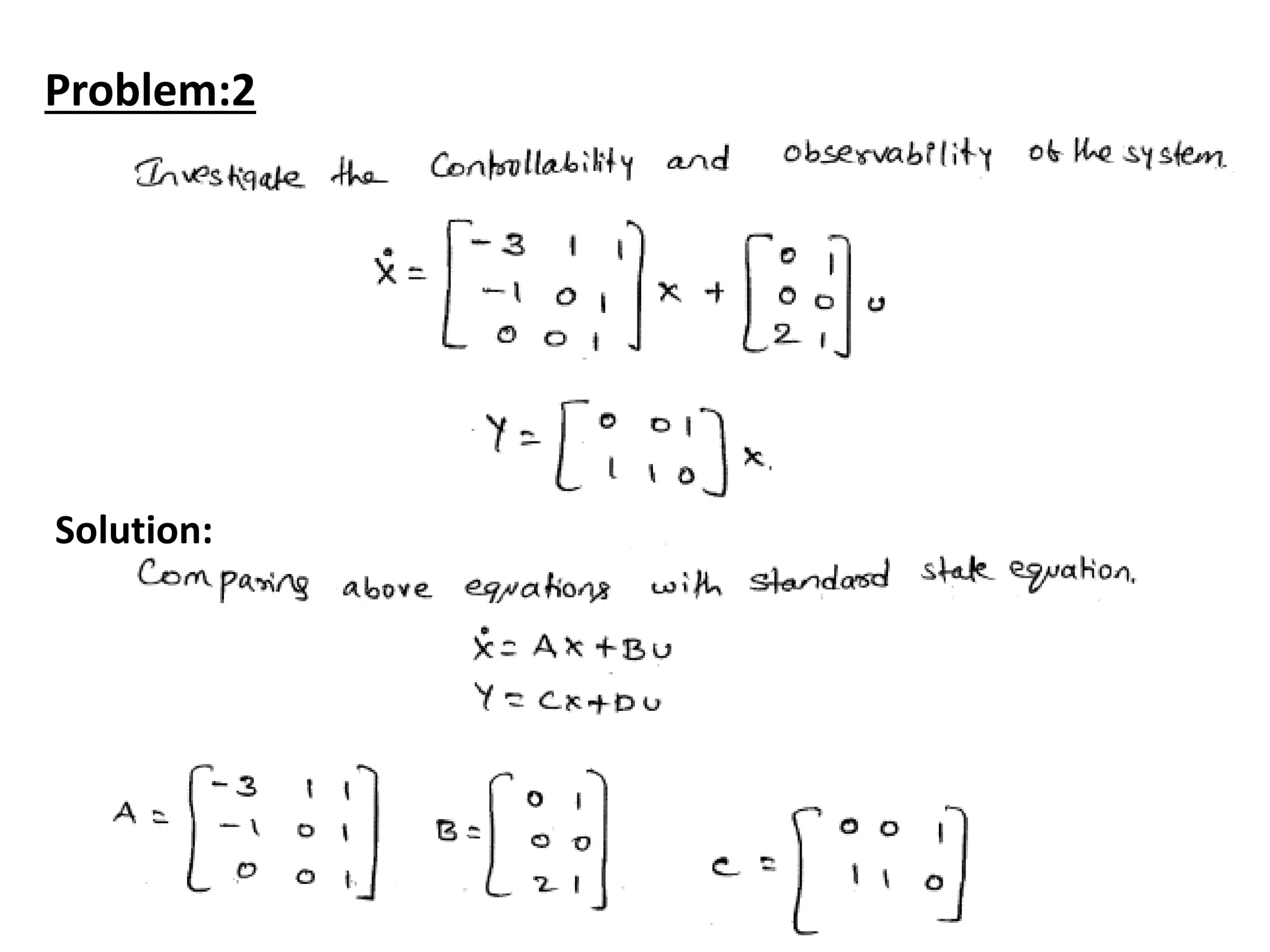
This document discusses state space analysis and related concepts. It defines state as a group of variables that summarize a system's history to predict future outputs. The minimum number of state variables required is equal to the number of storage elements in the system. These state variables form a state vector. The document also covers state space representation, diagonalization, solving state equations, the state transition matrix, and concepts of controllability and observability.