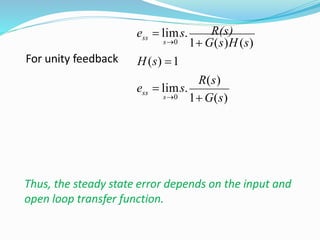
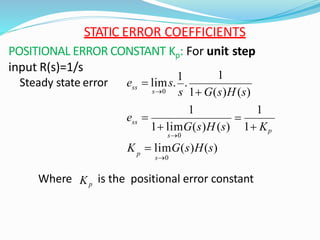
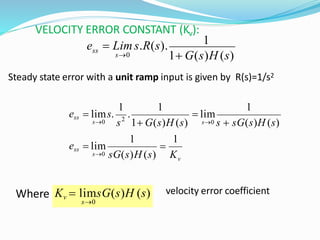
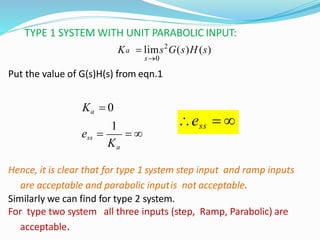
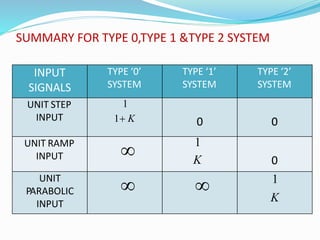
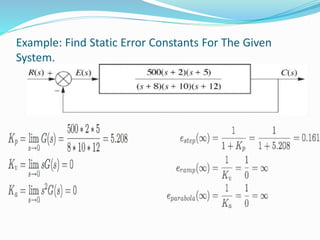
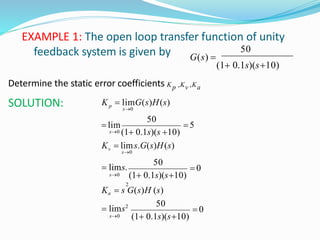
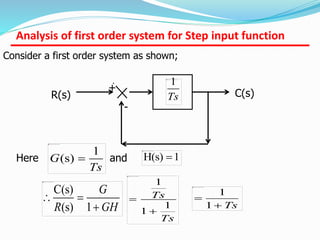
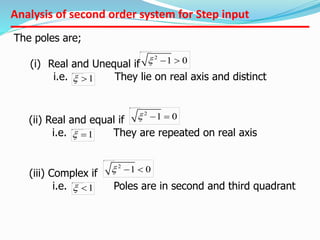
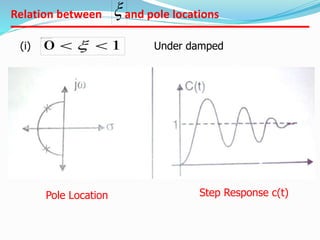
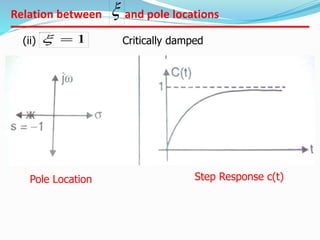
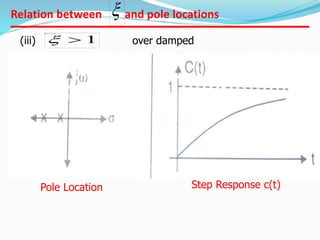
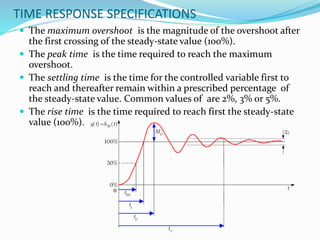
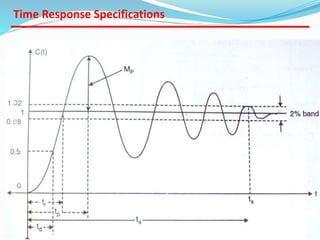
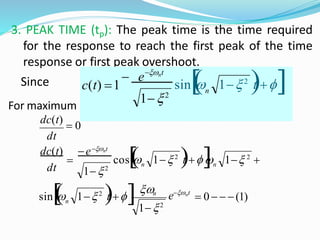
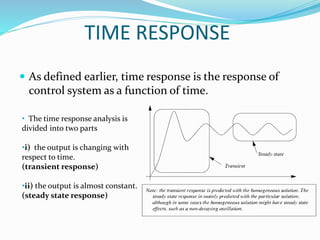
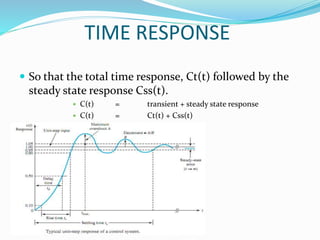
This document provides an analysis of the time response of control systems. It defines time response as the output of a system over time in response to an input that varies over time. The time response analysis is divided into transient response, which decays over time, and steady state response. Different types of input signals are described, including step, ramp, and sinusoidal inputs. Methods for analyzing the first and second order systems are presented, including determining the transient and steady state response. Static error coefficients like position, velocity and acceleration constants are defined for different system types and inputs. Examples are provided to illustrate the analysis of first and second order systems.
![INPUT SUPPLIED TO SYSTEM
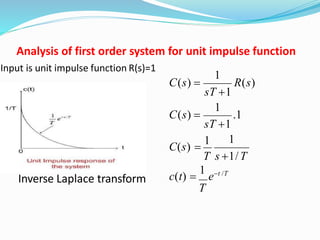
IMPULSE INPUT
•It is sudden change input. An impulse is
infinite at t=0 and everywhere else.
• r(t)= δ(t)= 1 t =0
= 0 t ≠o
In laplase domain we have,
• L[r(t)]= 1
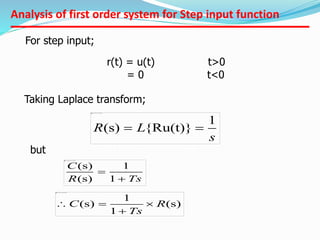
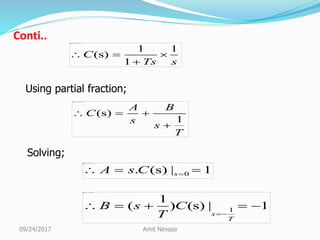
STEP INPUT
•It represents a constant command such
as position. Like elevator is a step input.
•r(t)= u(t)= A t ≥0
= 0 otherwise
L[r(t)]= A/s
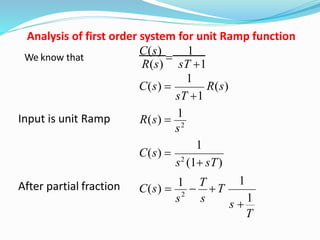
RAMP INPUT
• this represents a linearly increasing
input command.
•r(t) = At t ≥0,Aslope
= 0 t <0
L[r(t)]= A/s²
A= 1 then unit ramp](https://image.slidesharecdn.com/15099000111csetimeresponseanalysis-171004140043/85/time-response-analysis-10-320.jpg)
![INPUT SUPPLIED TO SYSTEM
PARABOLIC INPUT
•Rate of change of velocity is
acceleration. Acceleration is a parabolic
function.
• r(t) = At ²/2 t ≥0
= 0 t <0
L[r(t)]= A/s³
SINUSOIDAL INPUT
•It input of varying and study the system
frequently response.
• r(t) = A sin(wt) t ≥0](https://image.slidesharecdn.com/15099000111csetimeresponseanalysis-171004140043/85/time-response-analysis-11-320.jpg)