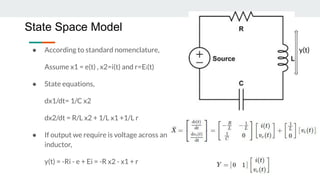
The document discusses state space analysis in electrical systems, introducing key concepts such as state variables, equations, and the mathematical modeling of energy storage in capacitors and inductors. It explains how state variables provide total information about a system's energy state and outlines the advantages and disadvantages of state models. Additionally, it highlights the applicability of state space methods to nonlinear, time-invariant, and multiple input-output systems.