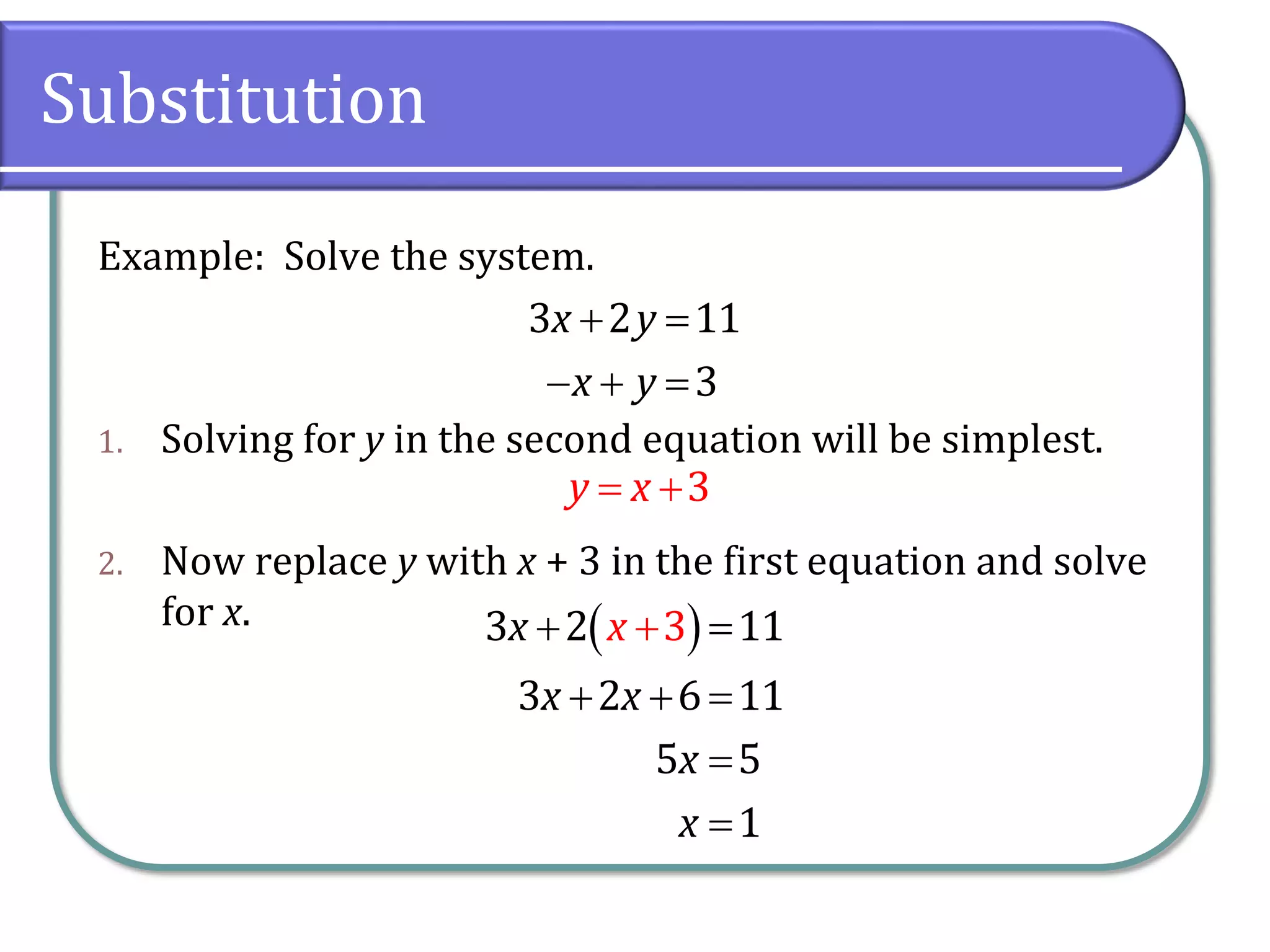
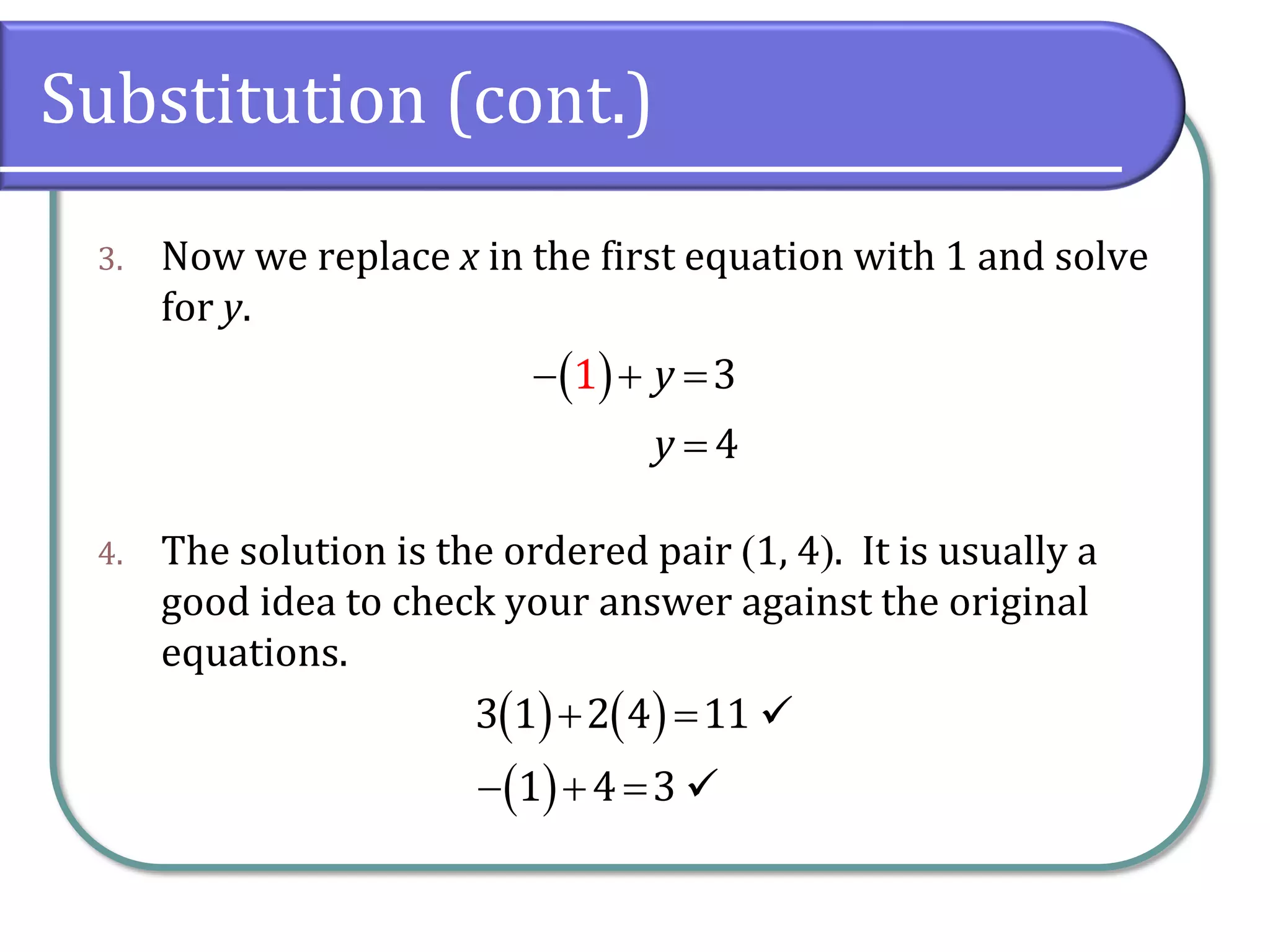
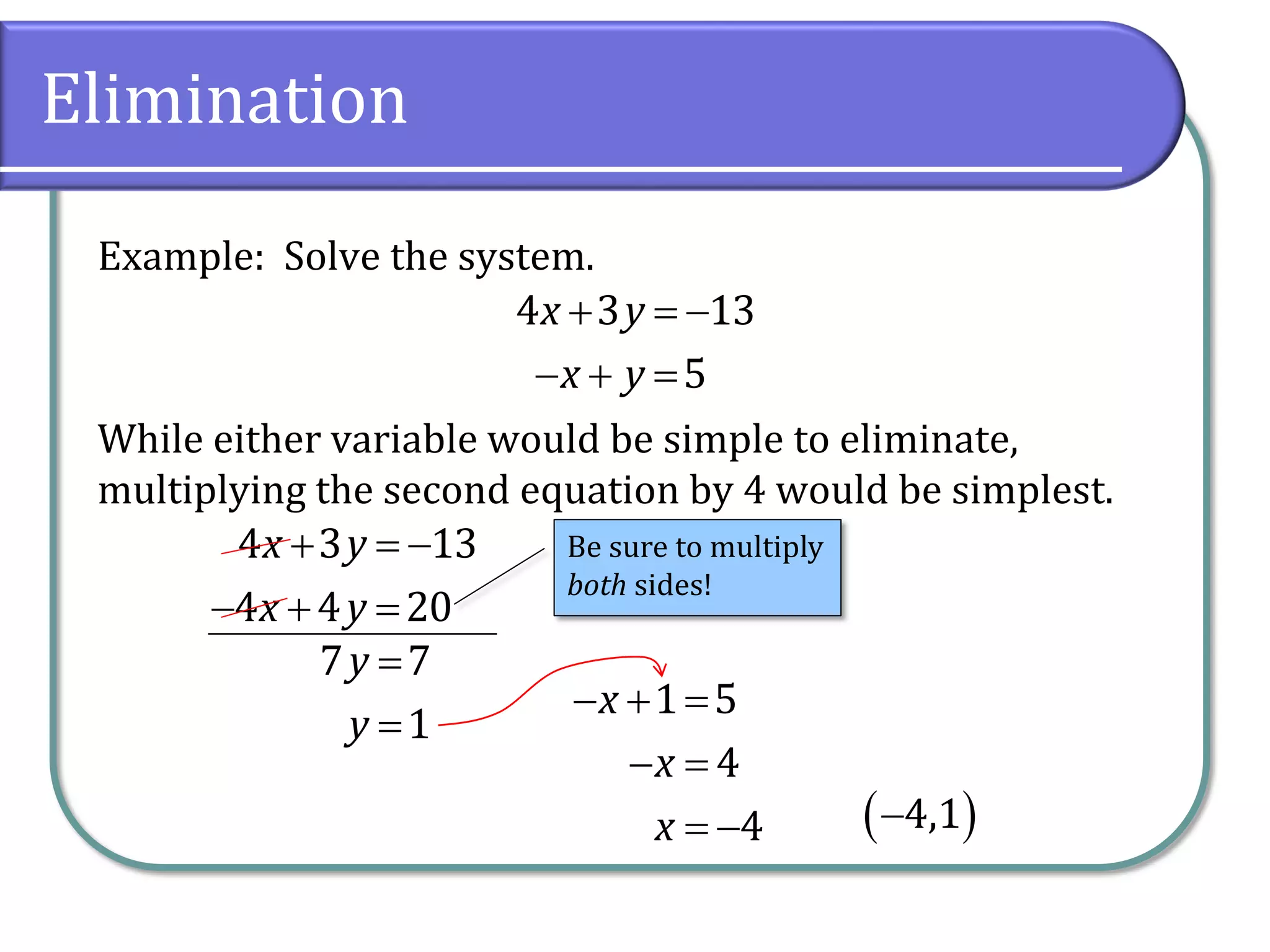
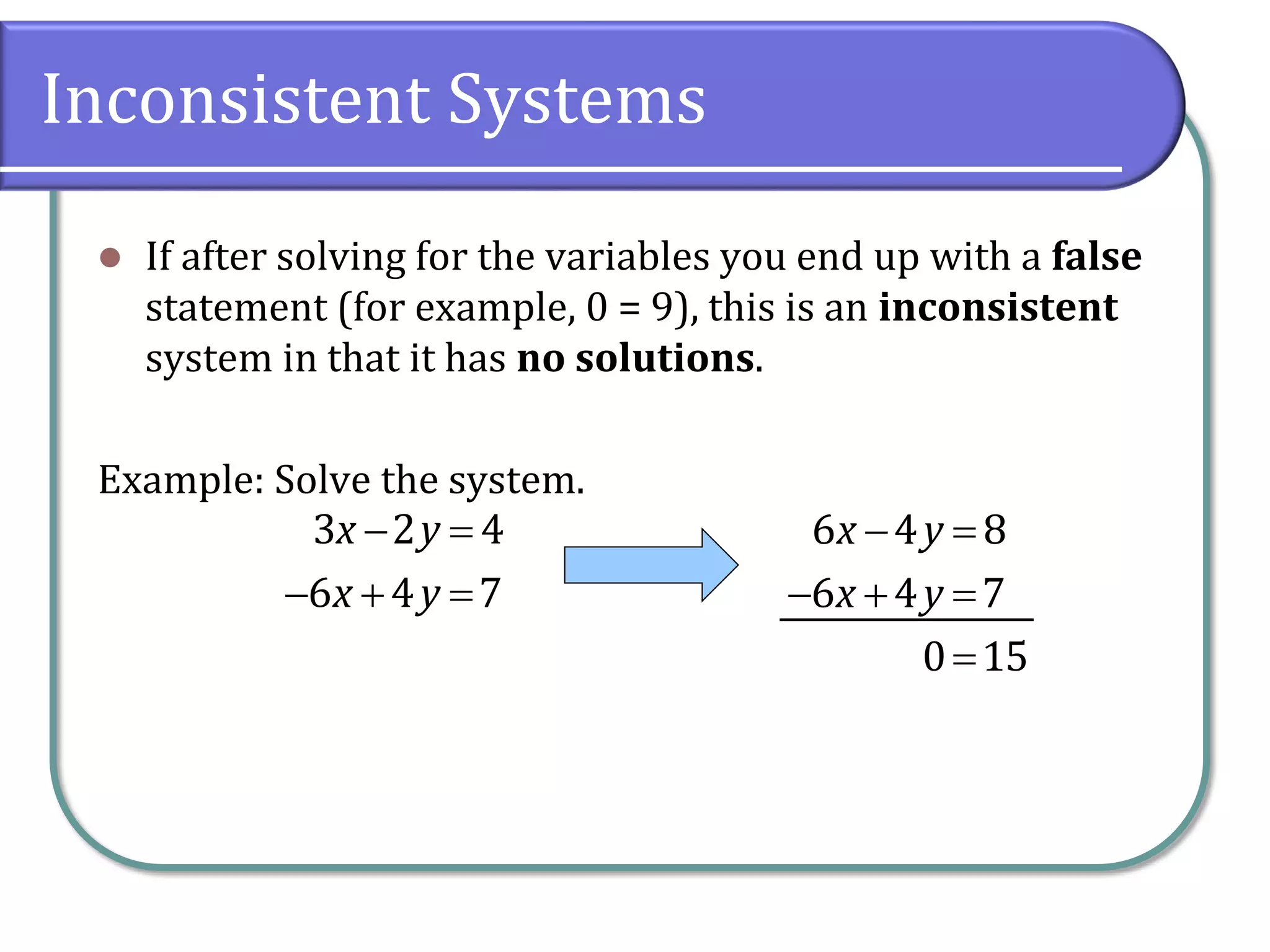
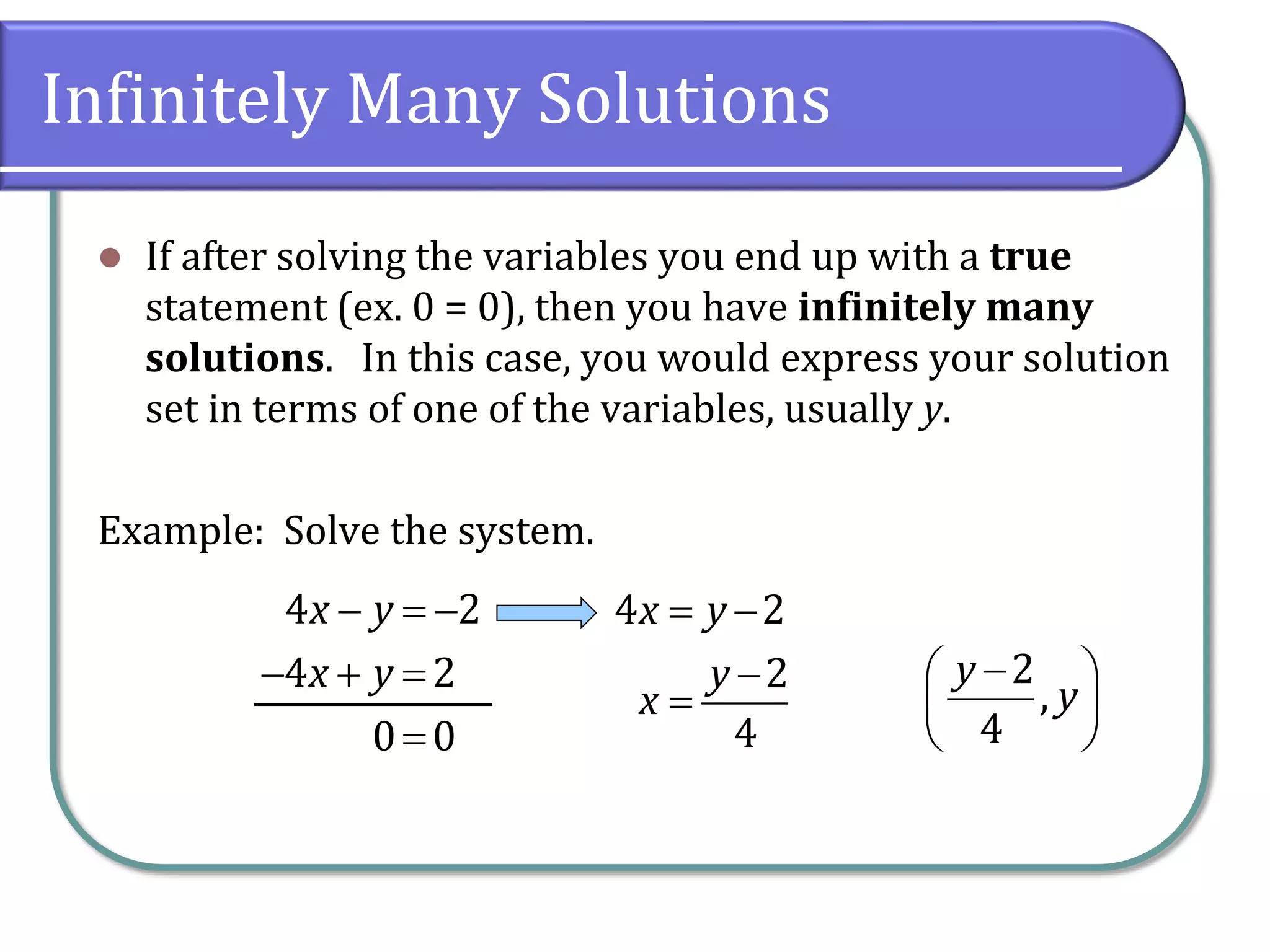
This document discusses systems of linear equations and methods for solving them. It defines a linear system as a set of equations where all variables have an exponent of 1. There are three possibilities for a system: 1) a single solution, 2) no solution (inconsistent), or 3) infinitely many solutions. Four methods are presented for solving systems: substitution, elimination, graphing, and matrices. Examples are provided to illustrate substitution and elimination. The document also discusses how to determine if a system is inconsistent or has infinitely many solutions based on the outcome of solving the system.