Downloaded 306 times
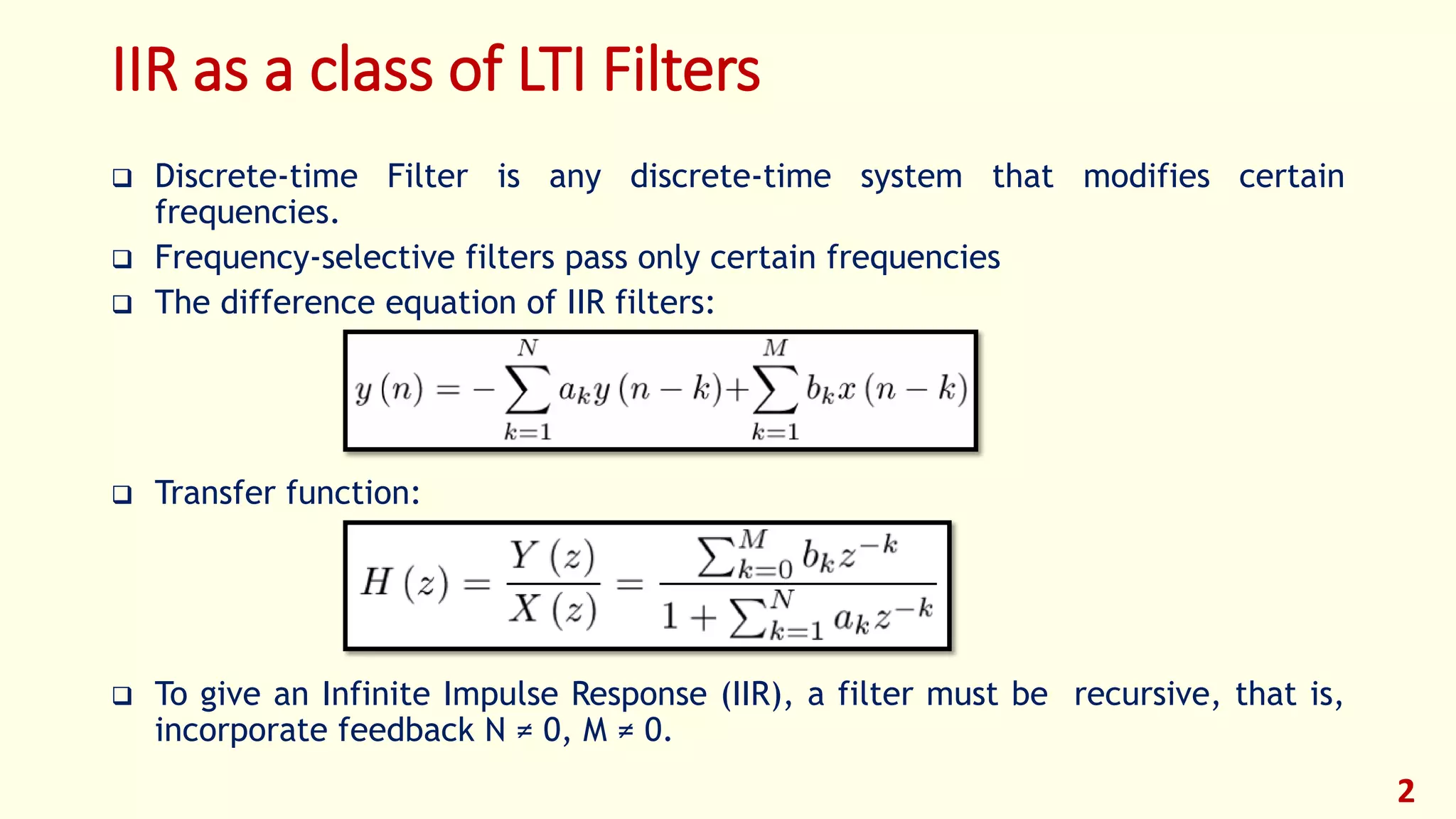
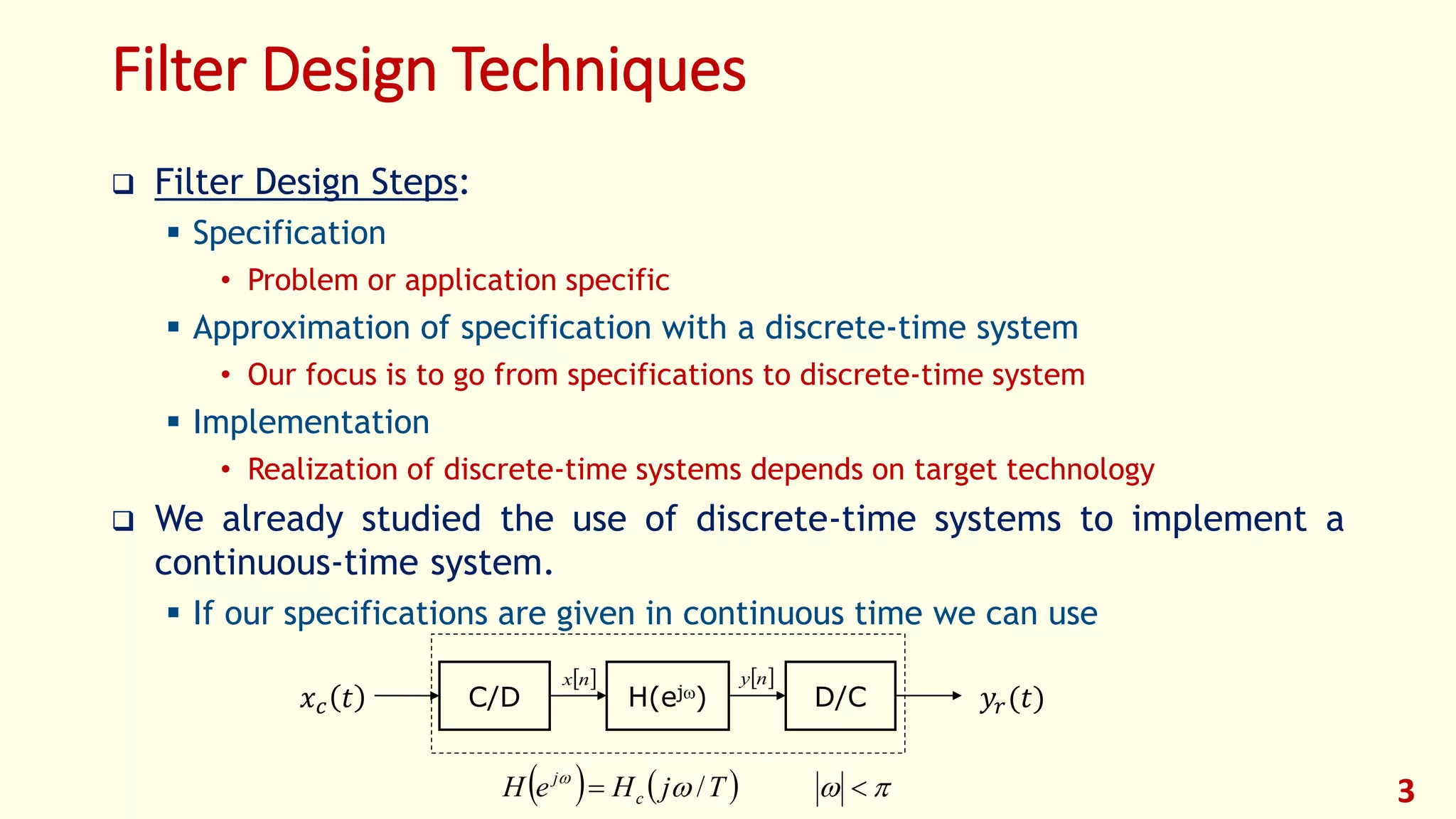











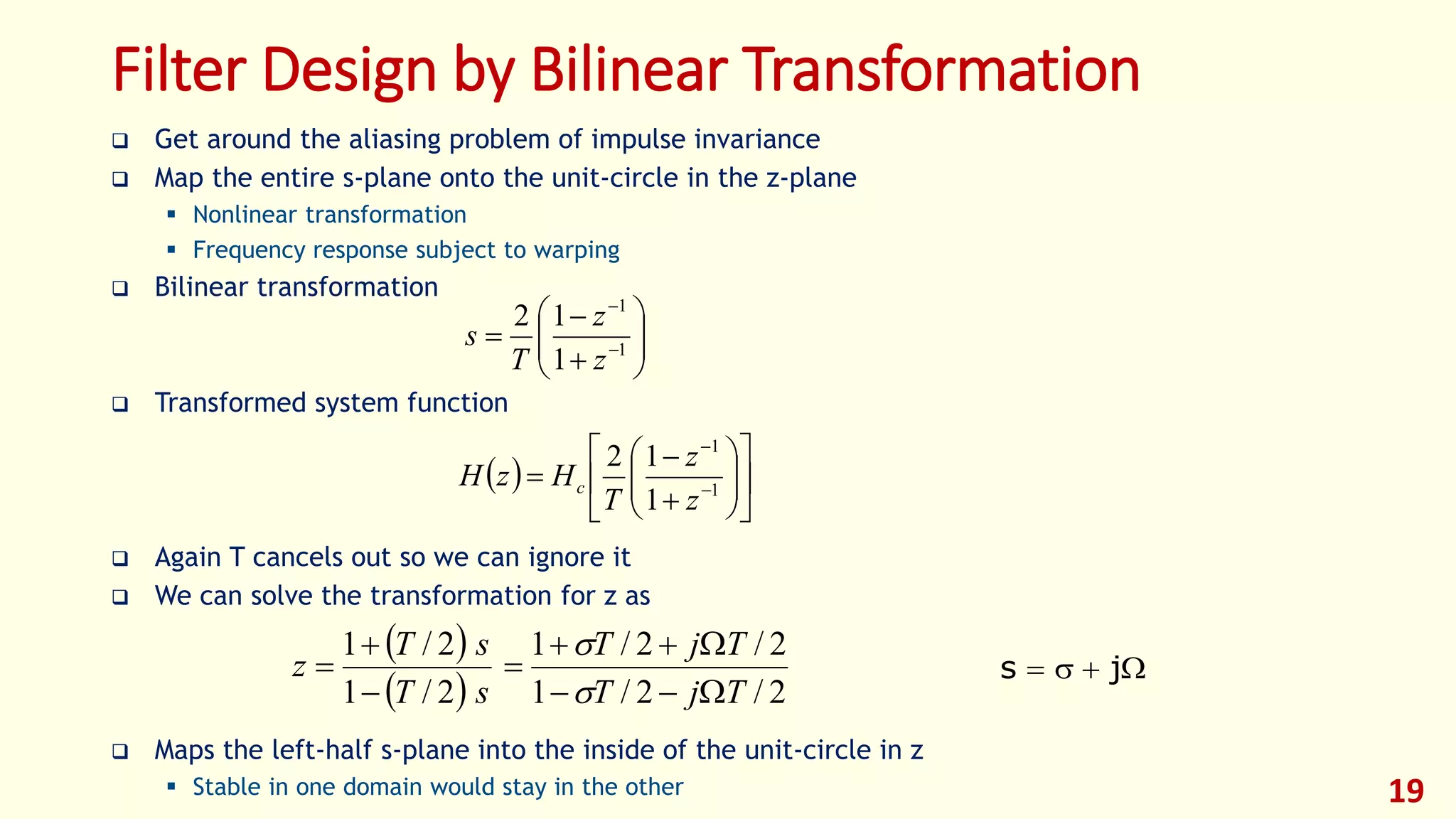




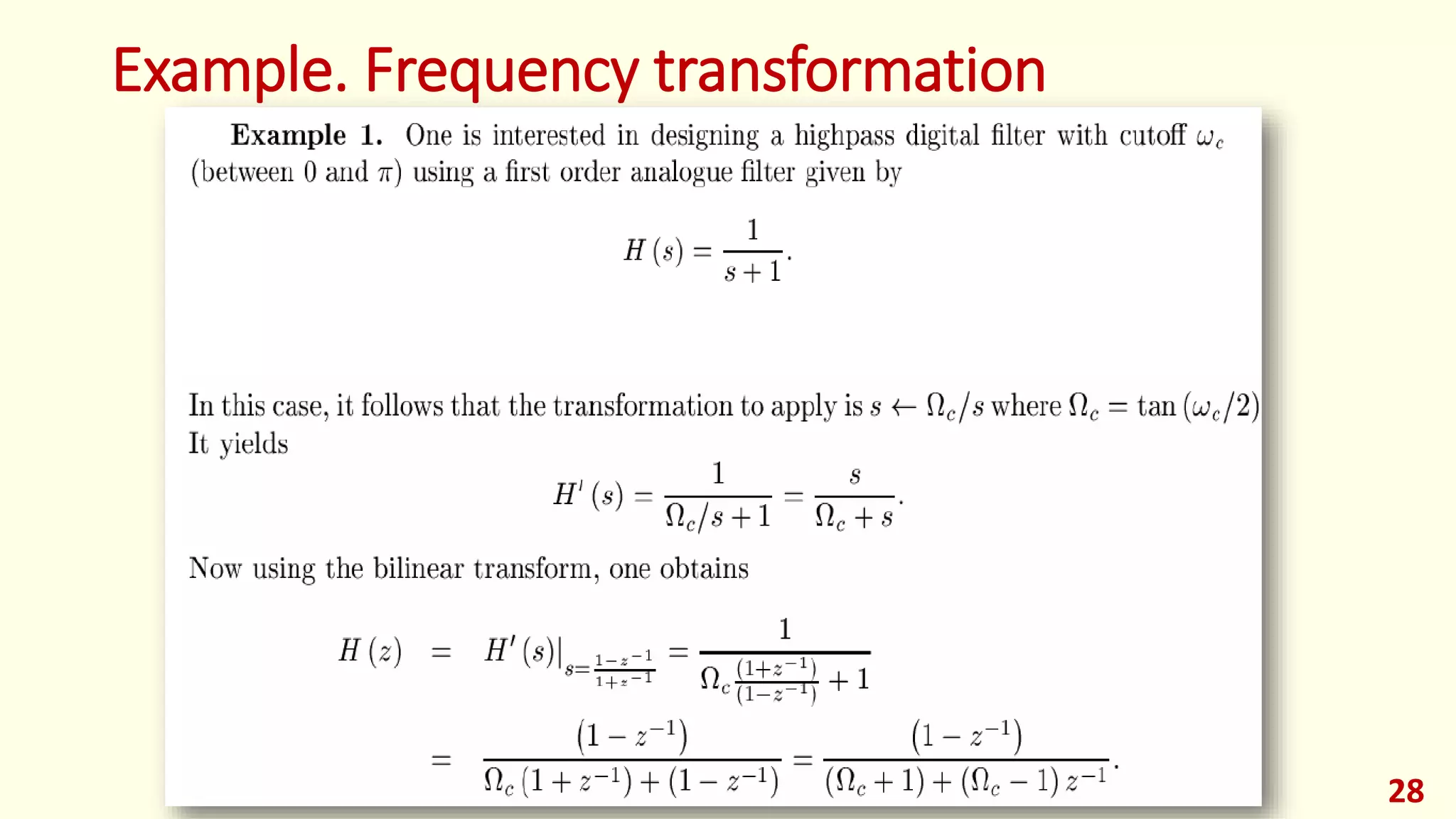
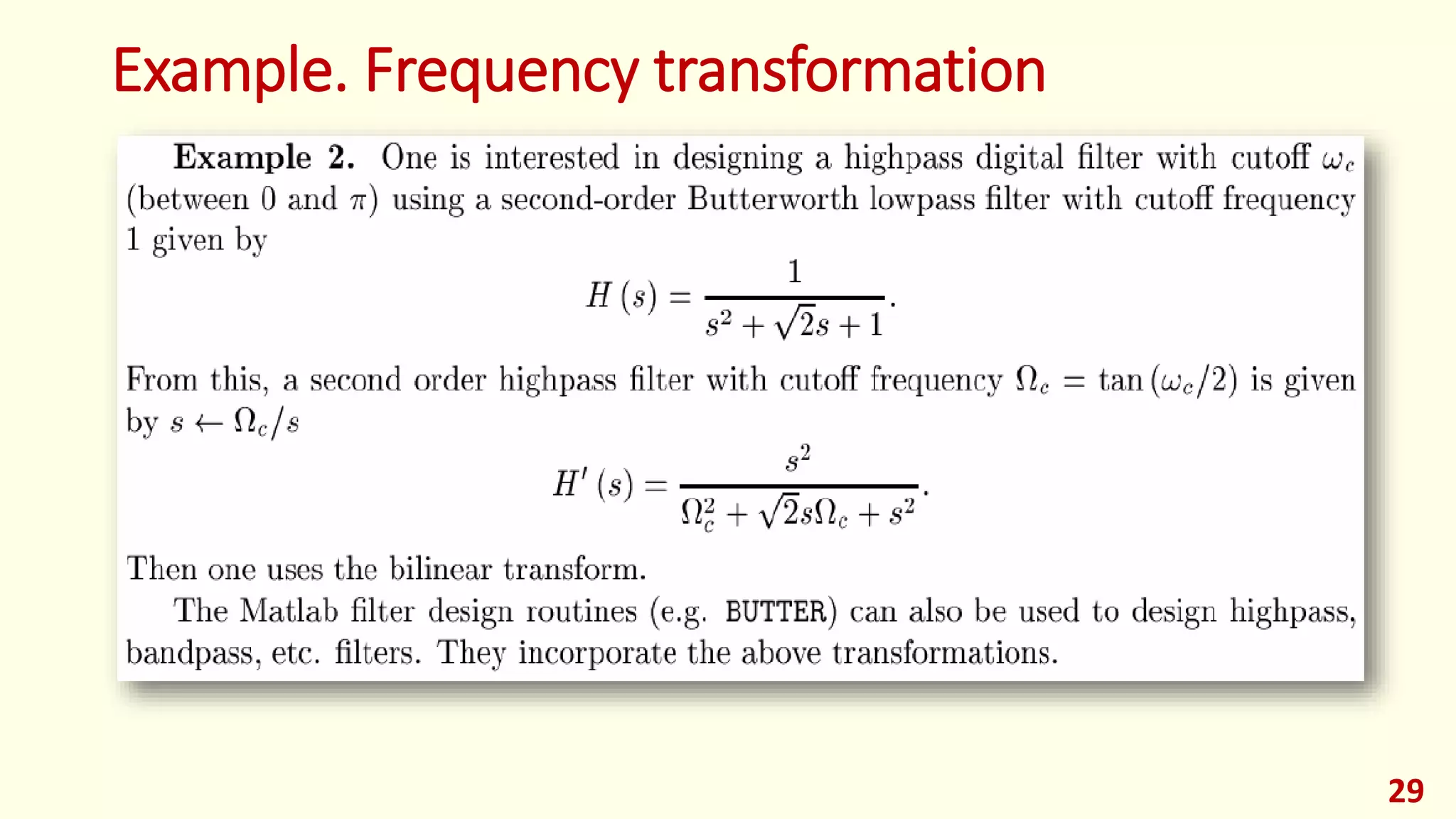
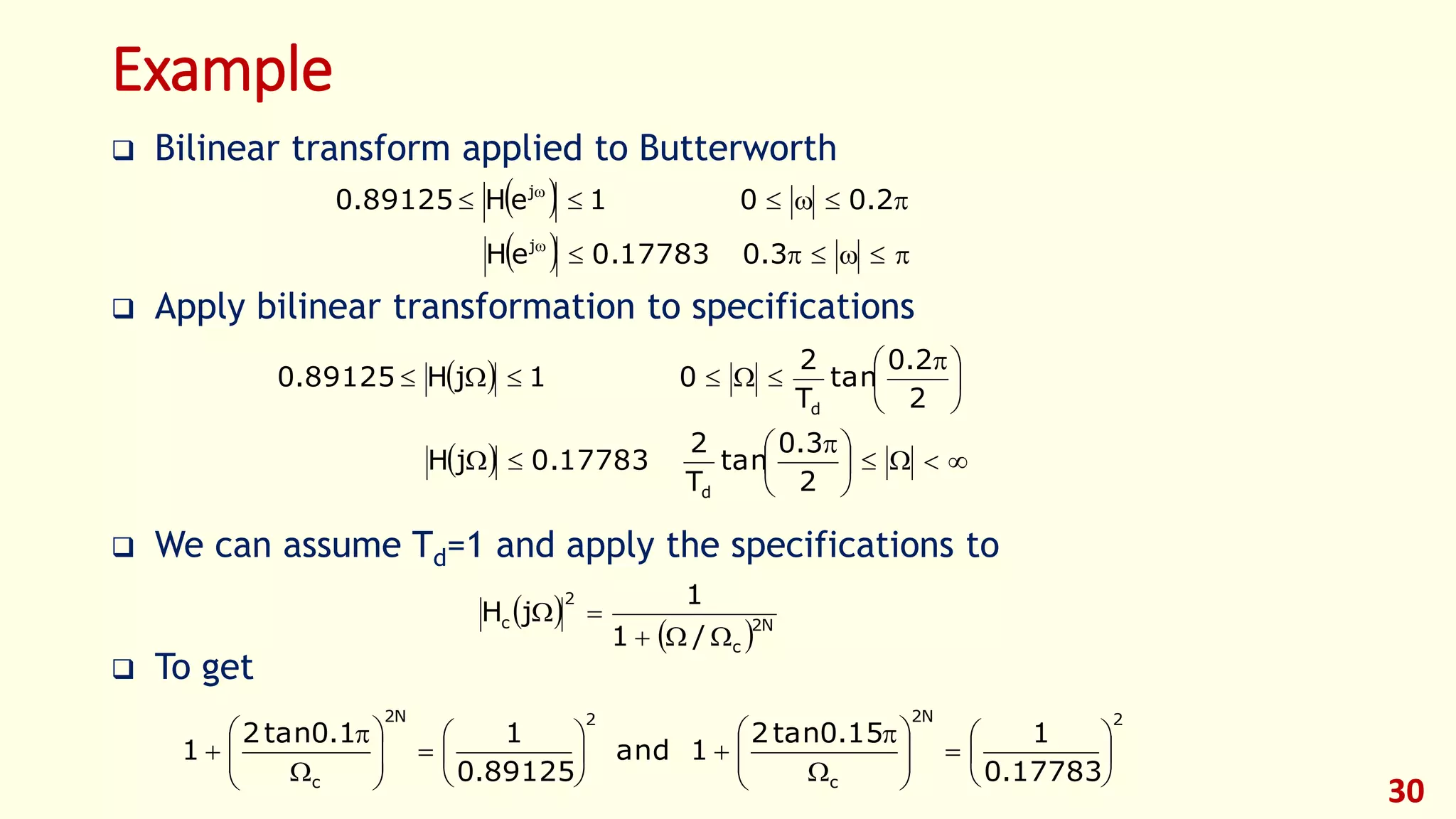
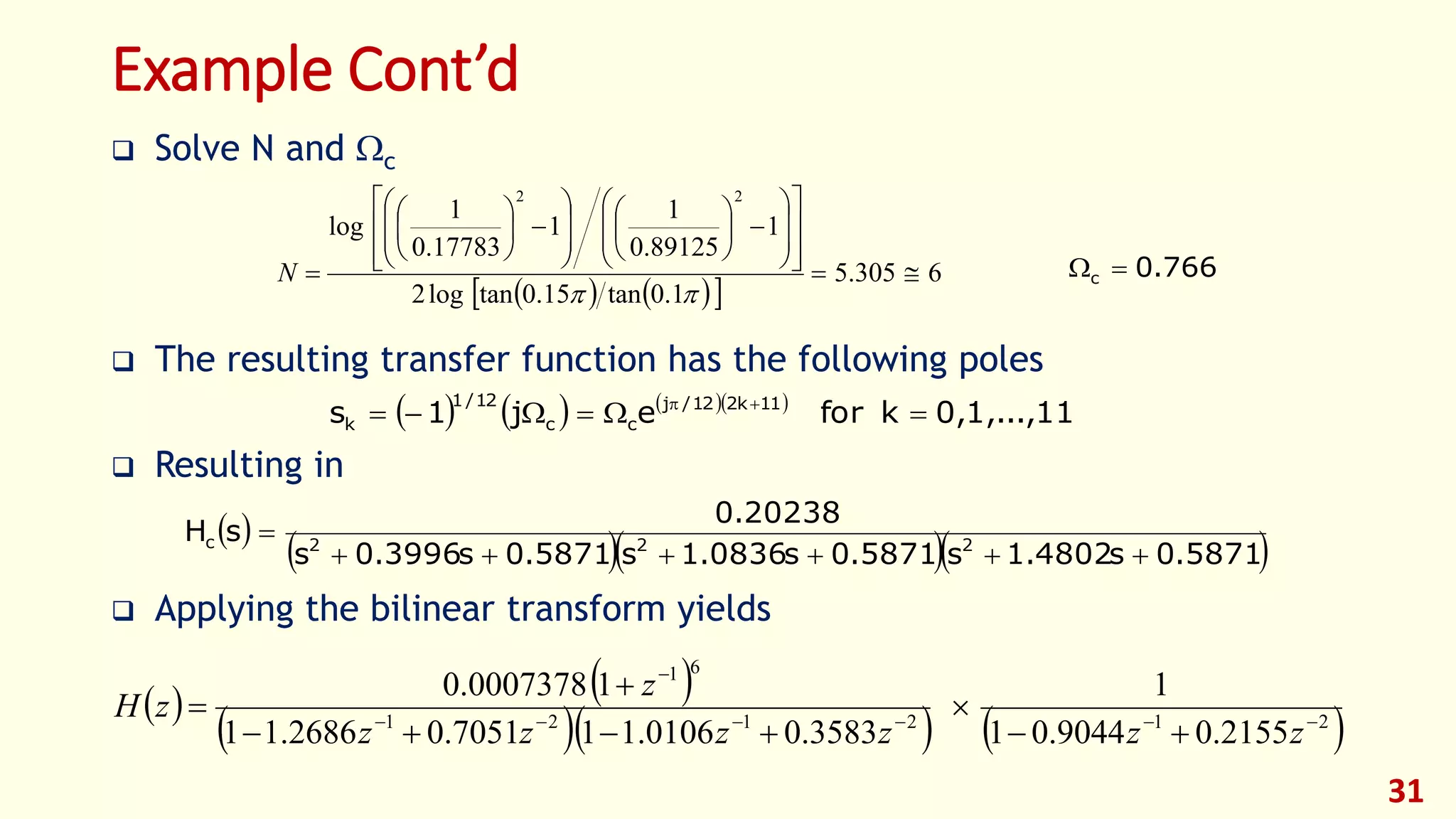



The document discusses techniques for designing discrete-time infinite impulse response (IIR) filters from continuous-time filter specifications. It covers the impulse invariance method, matched z-transform method, and bilinear transformation method. The impulse invariance method samples the continuous-time impulse response to obtain the discrete-time impulse response. The bilinear transformation maps the entire s-plane to the unit circle in the z-plane to avoid aliasing. Examples are provided to illustrate the design process using each method.