Downloaded 566 times

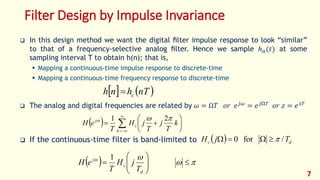
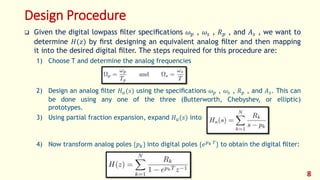
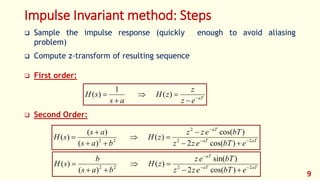
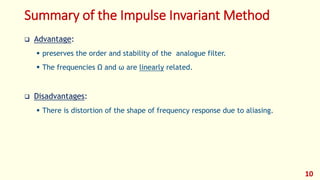
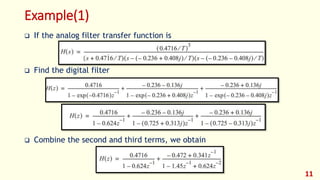
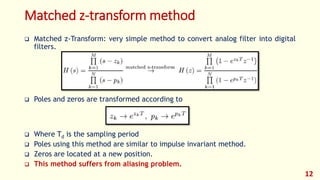
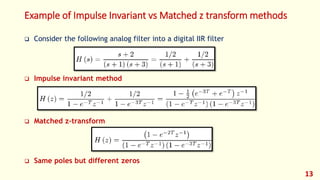
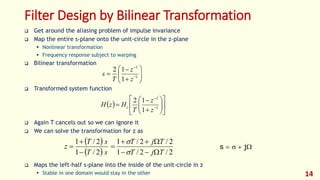
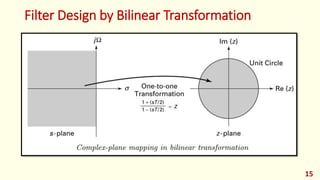
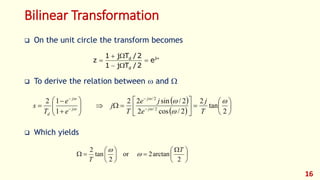
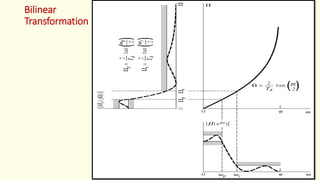
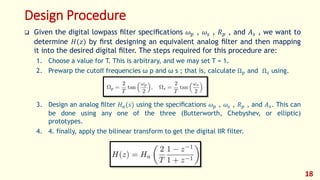
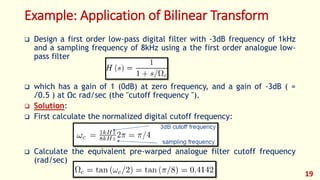
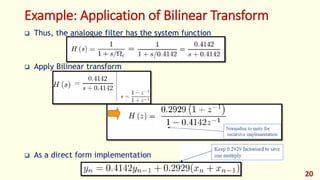
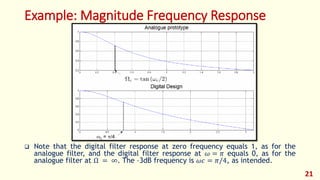
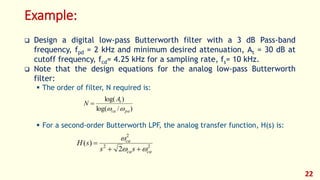
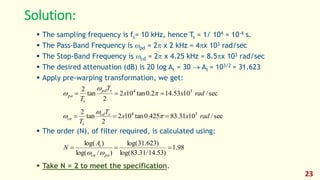
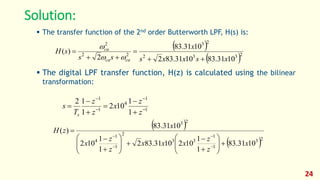
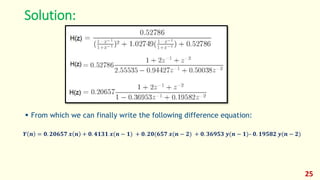
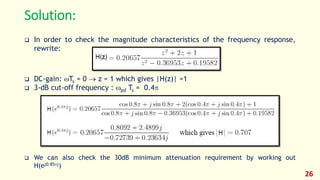


The document discusses the design of discrete-time IIR filters from continuous-time filter specifications. It covers common IIR filter design techniques including the impulse invariance method, matched z-transform method, and bilinear transformation method. An example applies the bilinear transformation to design a first-order low-pass digital filter from a continuous analog prototype. Filter design procedures and steps are provided.