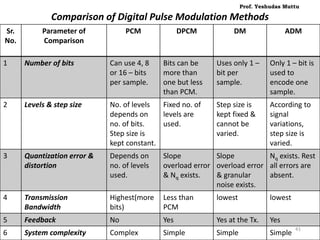
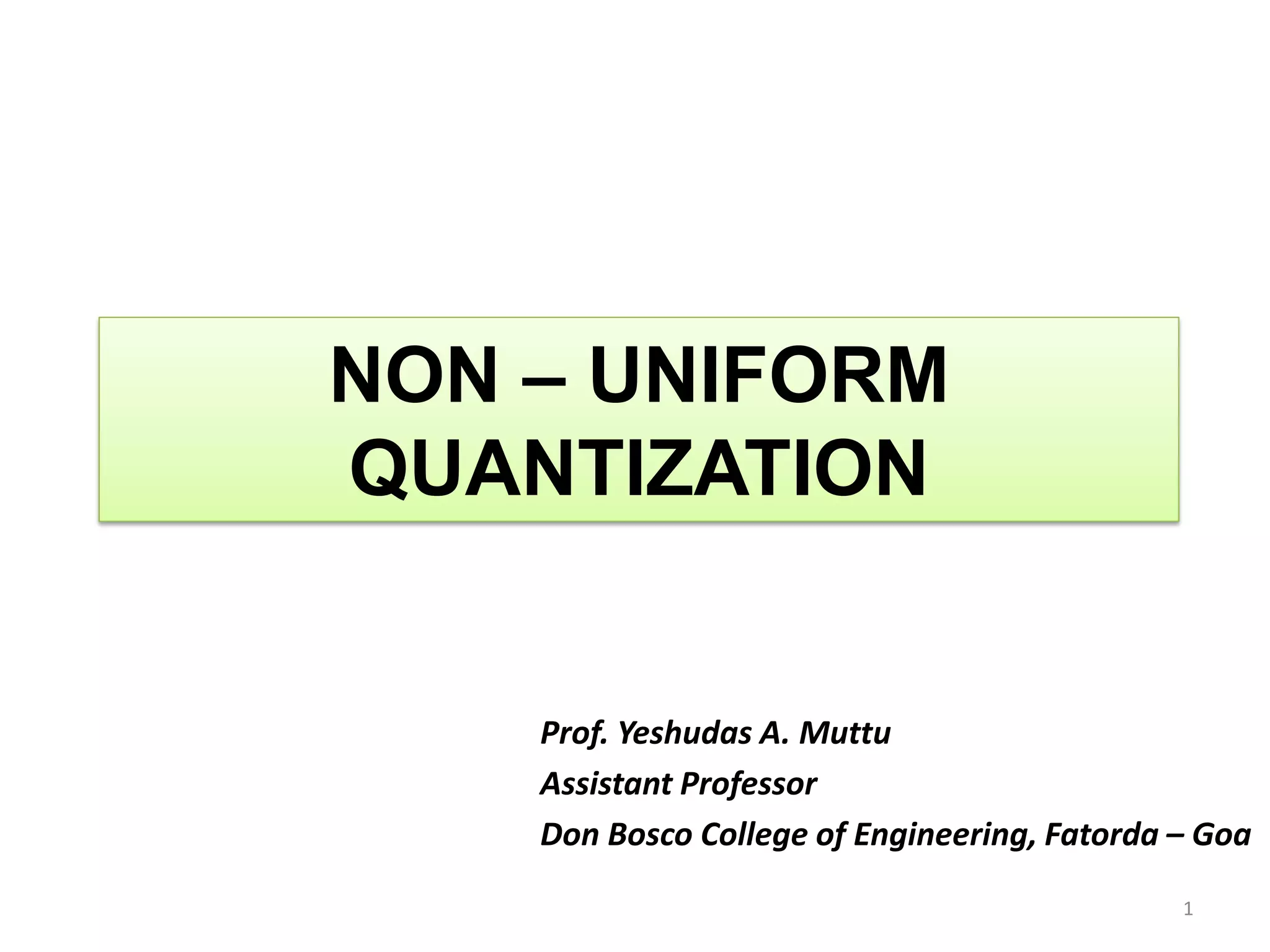
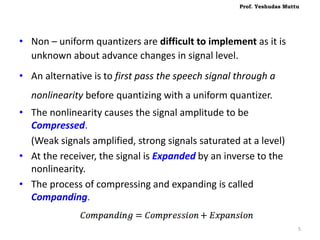
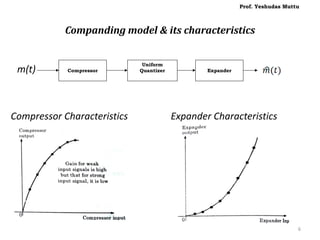
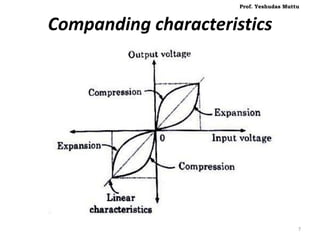
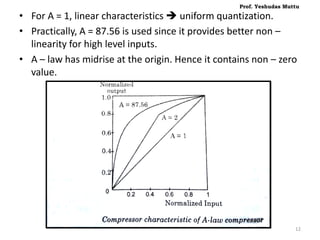
The document discusses non-uniform quantization and its advantages for signals with a non-uniform distribution, emphasizing the concept of varying step sizes to optimize signal-to-noise ratio (SNR). It introduces companding as a process to compress signals before quantization and discusses different companding laws (μ-law and A-law) used in telecommunication systems. Additionally, it covers various pulse code modulation (PCM) techniques, including differential PCM and delta modulation, highlighting their advantages and disadvantages in terms of complexity and bandwidth requirements.
![Contd...
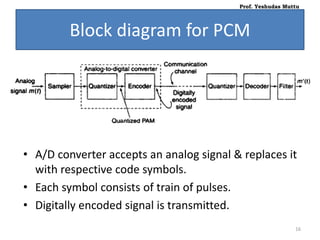
• At the Receiver,
• Separation of noise due to channel.
• Done by Quantization.(Re quantization)
• Simple decision, For each Pulse duration, pulse Rxed or not.
• If quantized signal was sent in place of digitally encoded signal:
• At rx, it wud hav to deal with all the levels of quantization.
• [Advantage : Reliable since we send digitally encoded signal rather than
jus quantized signal]
• Quantizer sends its decision to the decoder(D/A) in the form of
regenerated pulse train
• Output of decoder is quantized multilevel sample pulses.
• This is then filtered to obtain msg signal back.
Prof. Yeshudas Muttu
17](https://image.slidesharecdn.com/non-uniformquantizationpcm-180923082954/85/Companding-Pulse-Code-Modulation-17-320.jpg)
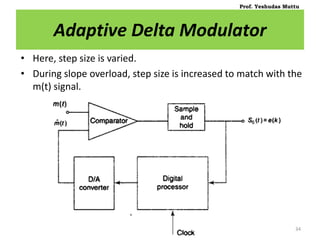
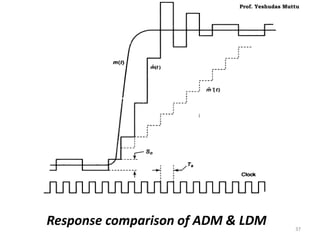
![• Hence, at kth sampling time, step size is given by,
[ New step size ] [ old step size ] [ Some increment ]
• When m(t) > , jumps larger to match with m(t).
• But, it may take larger time for step S to decay in magnitude when
not needed.
• When m(t) = constant, oscillates about m(t) but frequency of
oscillation is half the clock freq.
• Slope overload decreases, Nq increases slightly.
• Slope overload error in reconstructed signal affects low freq. range.
• Nq introduces HF components.
• Power in speech signal is concentrated more in LF components.
• This, when passed thru’ LPF, HF components by Nq are removed.
Prof. Yeshudas Muttu
36](https://image.slidesharecdn.com/non-uniformquantizationpcm-180923082954/85/Companding-Pulse-Code-Modulation-36-320.jpg)