Downloaded 92 times

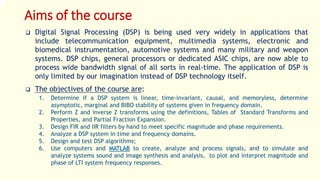

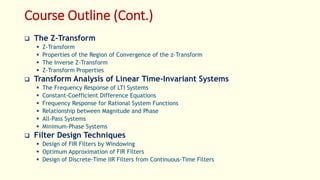
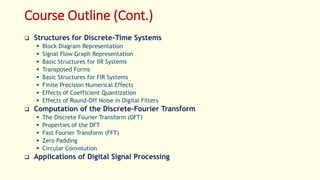


This document outlines the course details for a digital signal processing course. The main goal of the course is to design digital linear time-invariant filters that are widely used in applications such as audio, communications, radar, and biomedical engineering. Topics that will be covered include sampling of continuous-time signals, discrete-time signals and systems, the z-transform, filter design techniques, discrete Fourier transforms, and applications of digital signal processing. Students will be evaluated based on midterm and final exams, quizzes, assignments, and a project.
































![Digital Signal Processing[ECEG-3171]-L00](https://cdn.slidesharecdn.com/ss_thumbnails/dspl00-180427094421-thumbnail.jpg?width=640&height=640&fit=bounds)