Downloaded 817 times
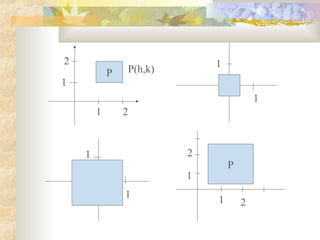
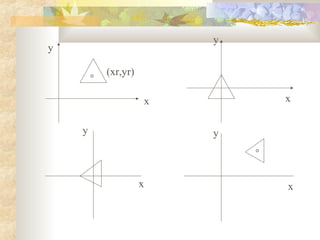
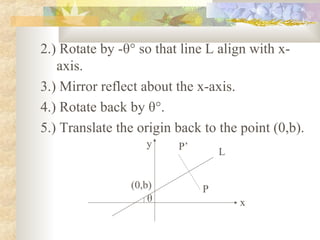
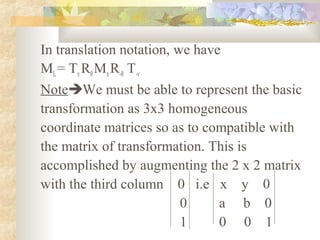

The document discusses how more complex geometric transformations can be performed by combining basic transformations through composition. It provides examples of how scaling and rotation can be done with respect to a fixed point by first translating the object to align the point with the origin, then performing the basic transformation, and finally translating back. Mirror reflection about a line is similarly described as a composite of translations and rotations.