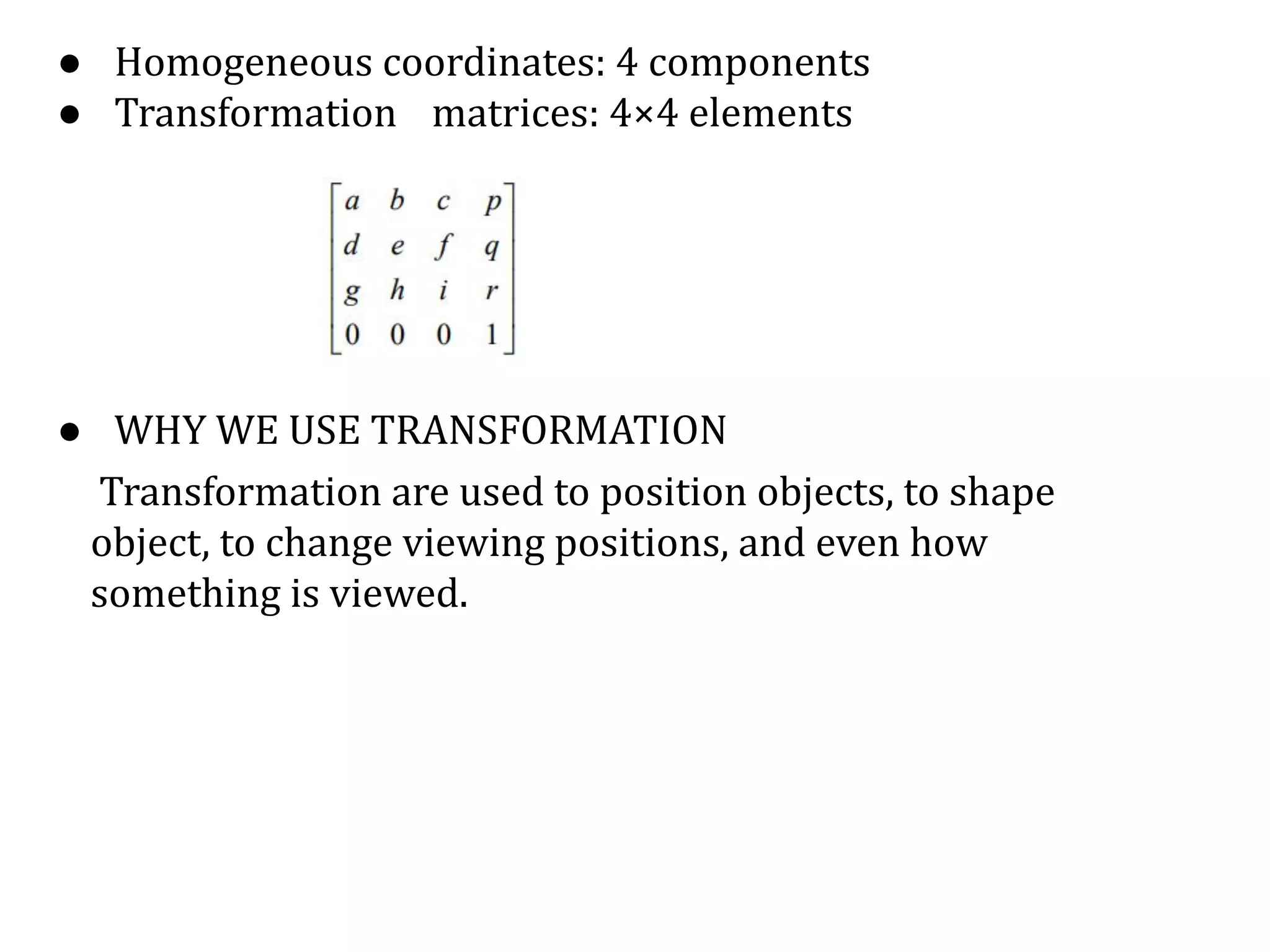
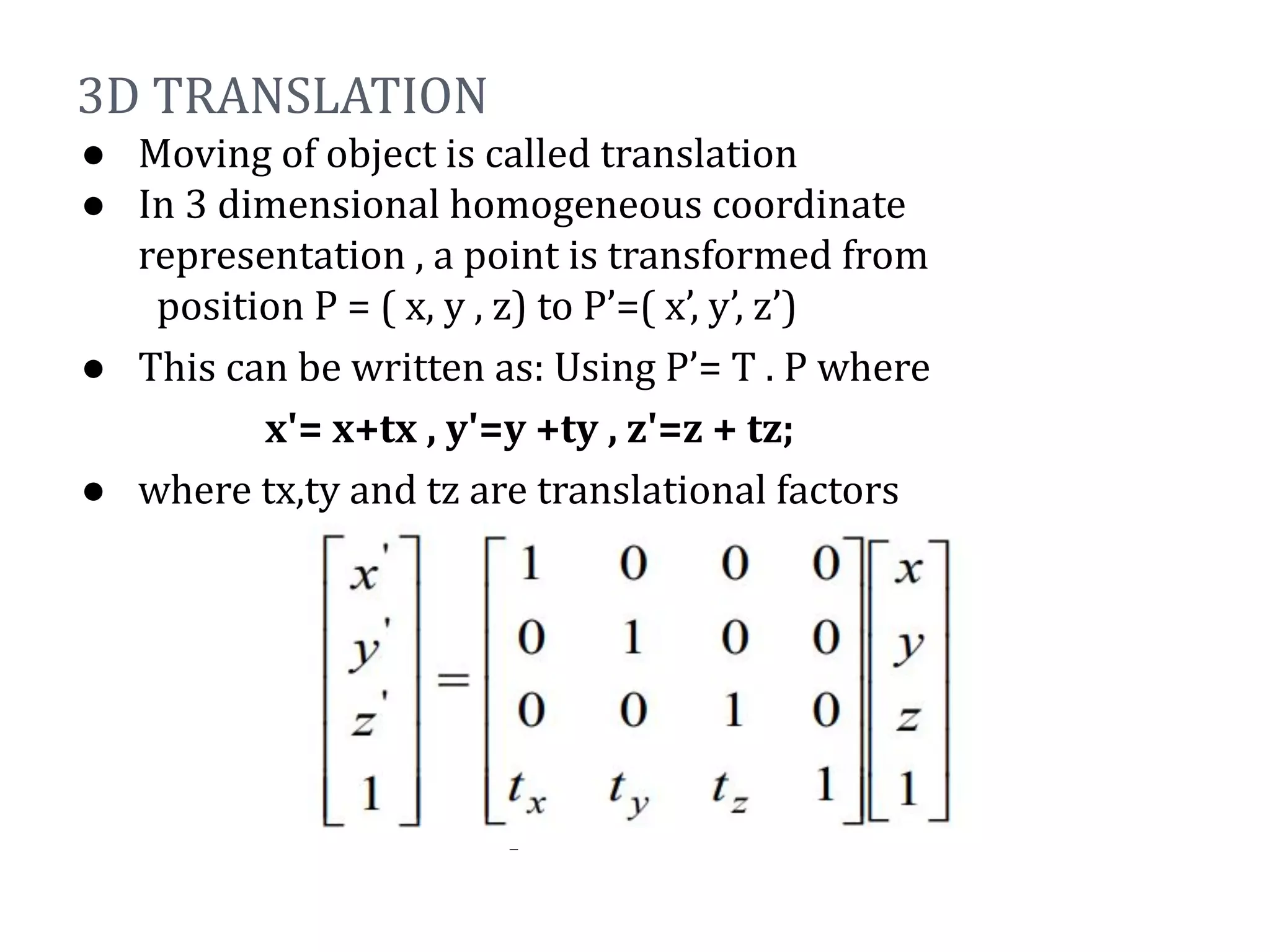
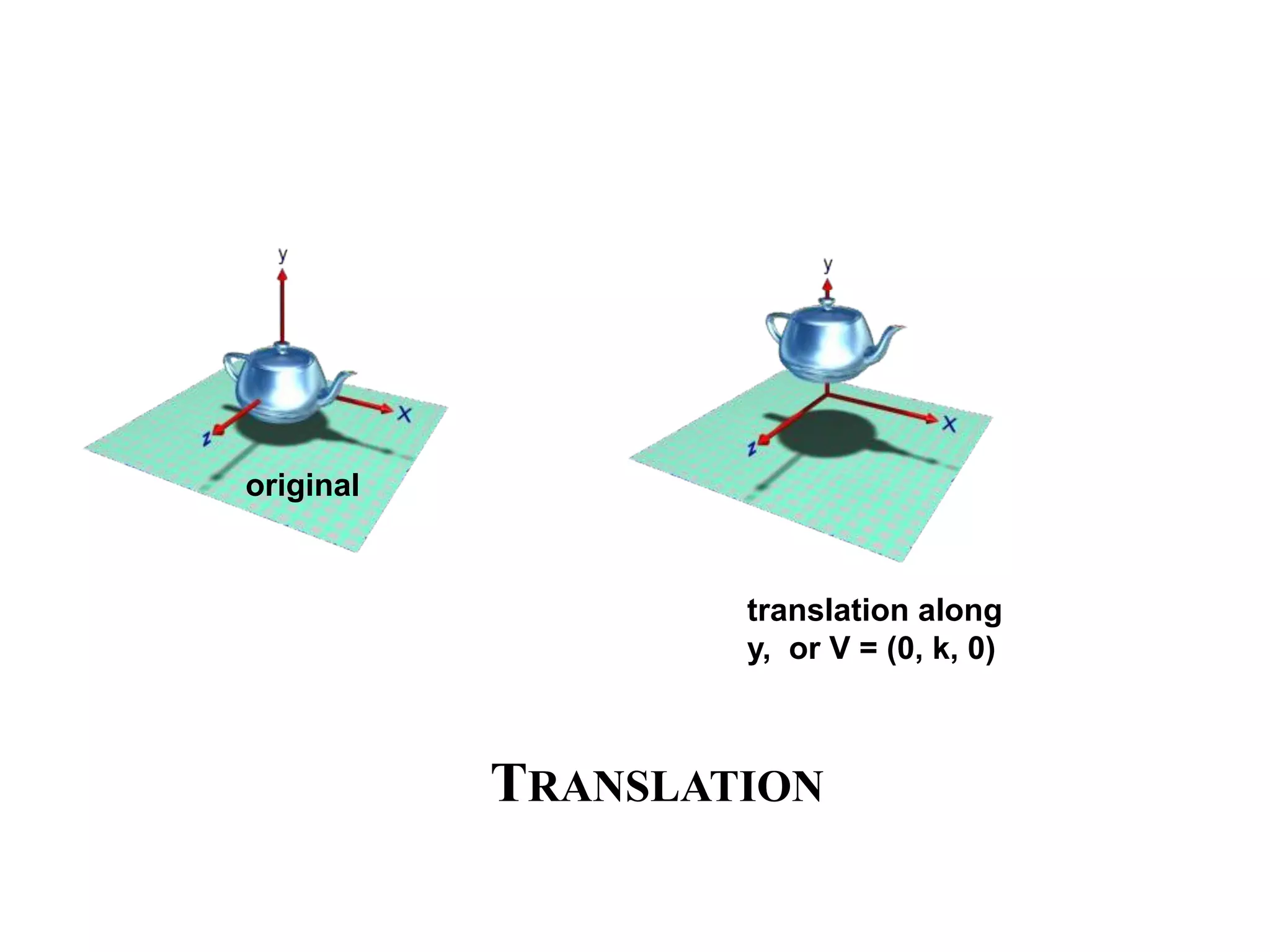
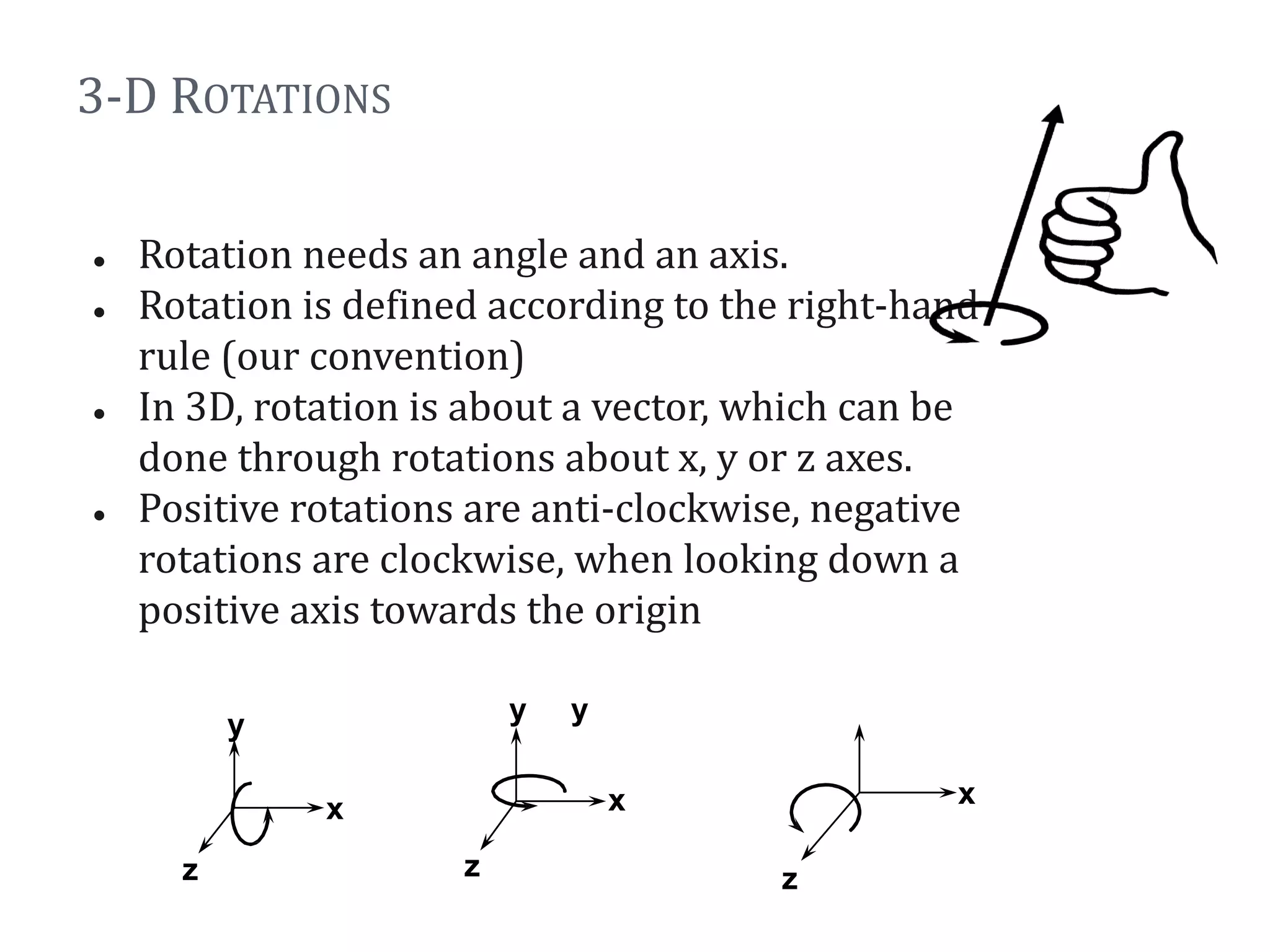
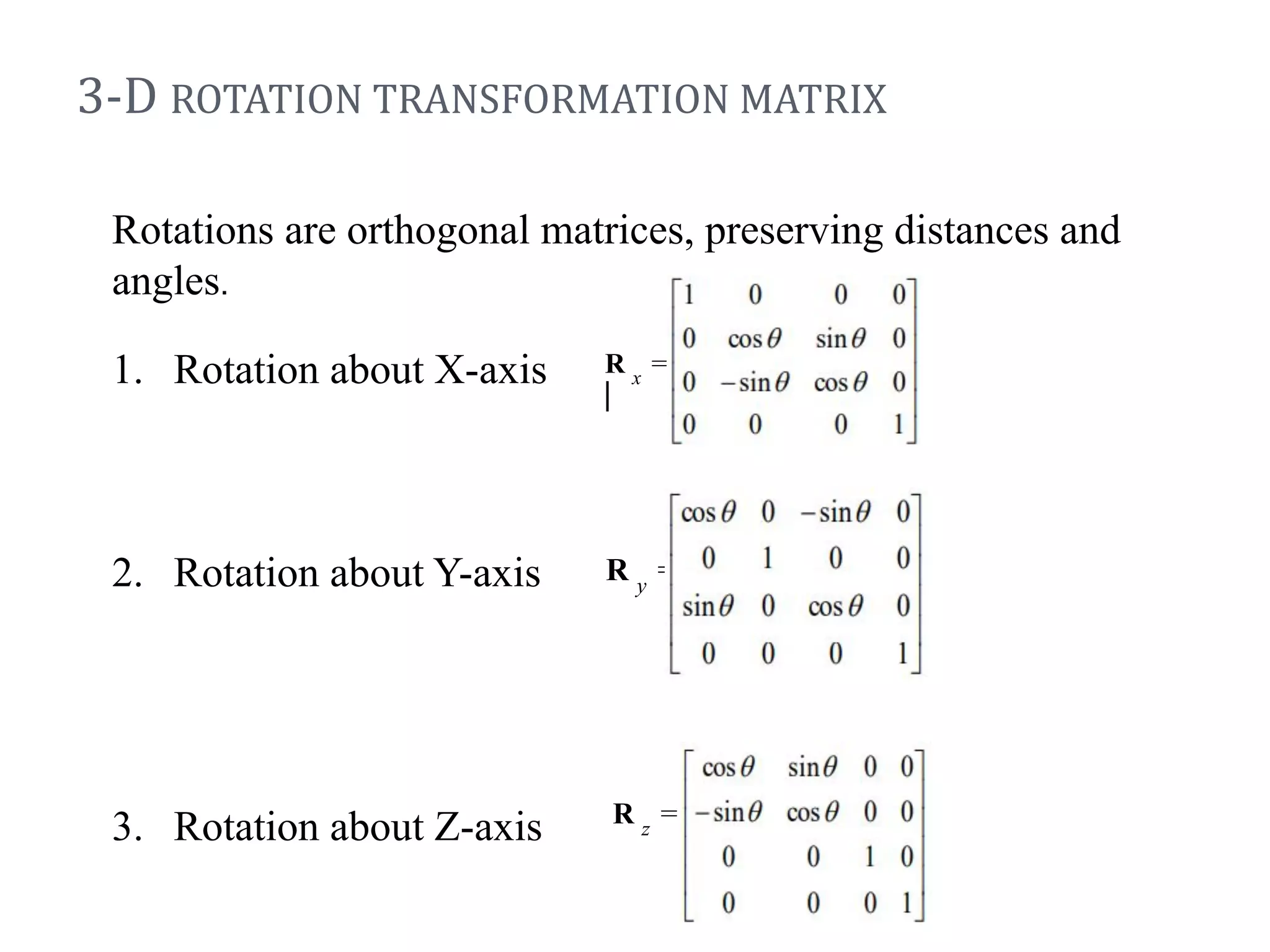
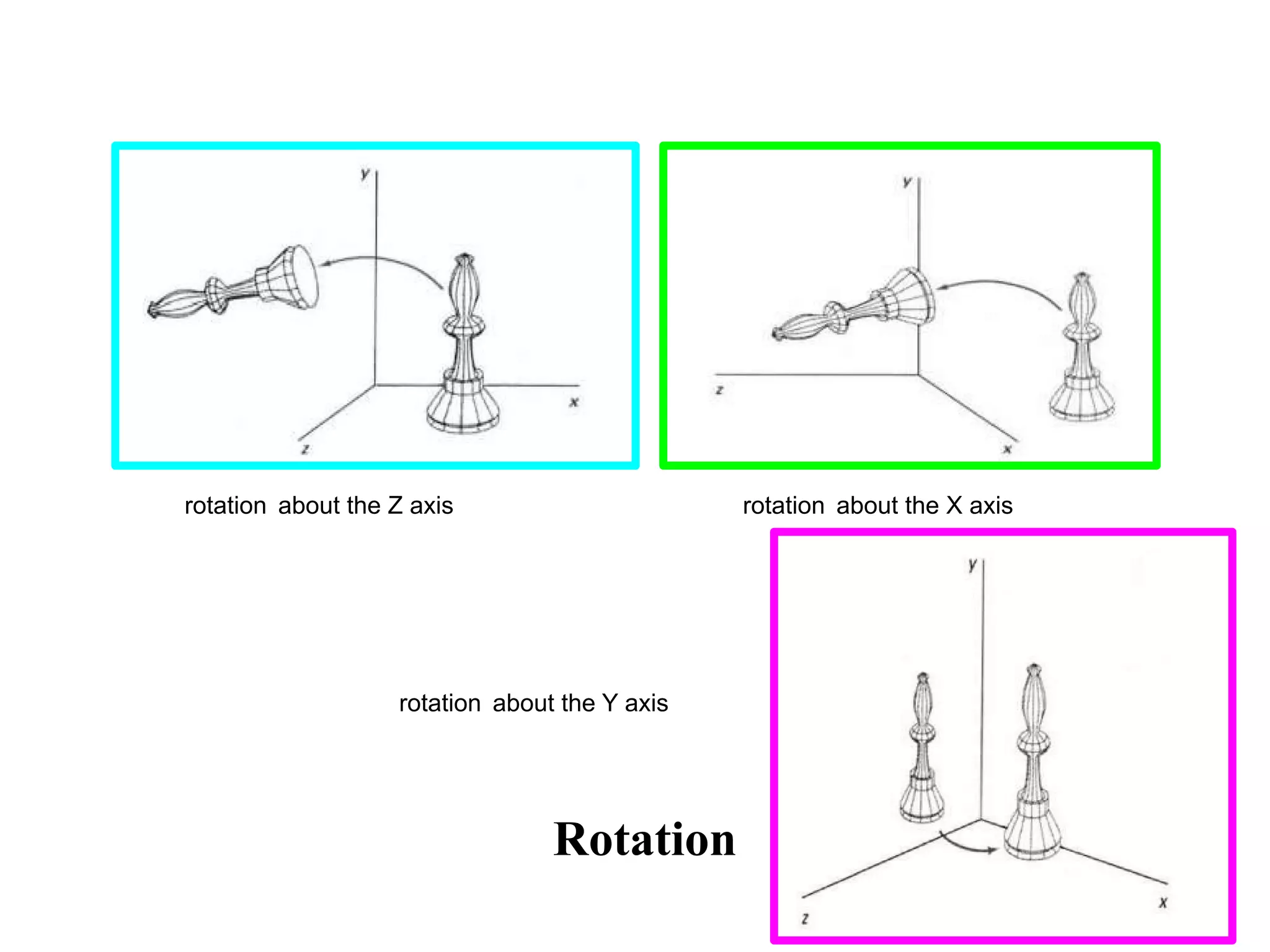
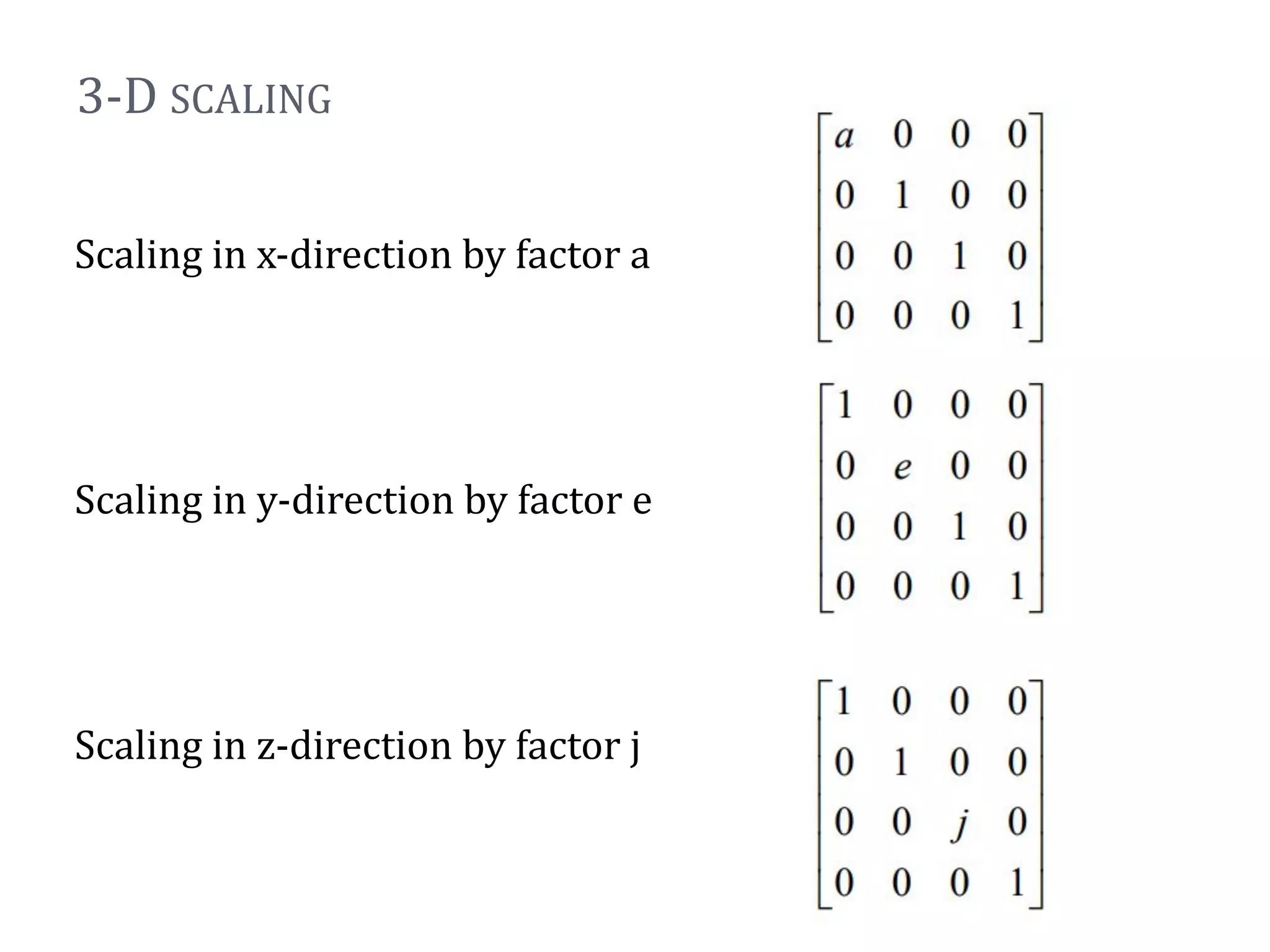
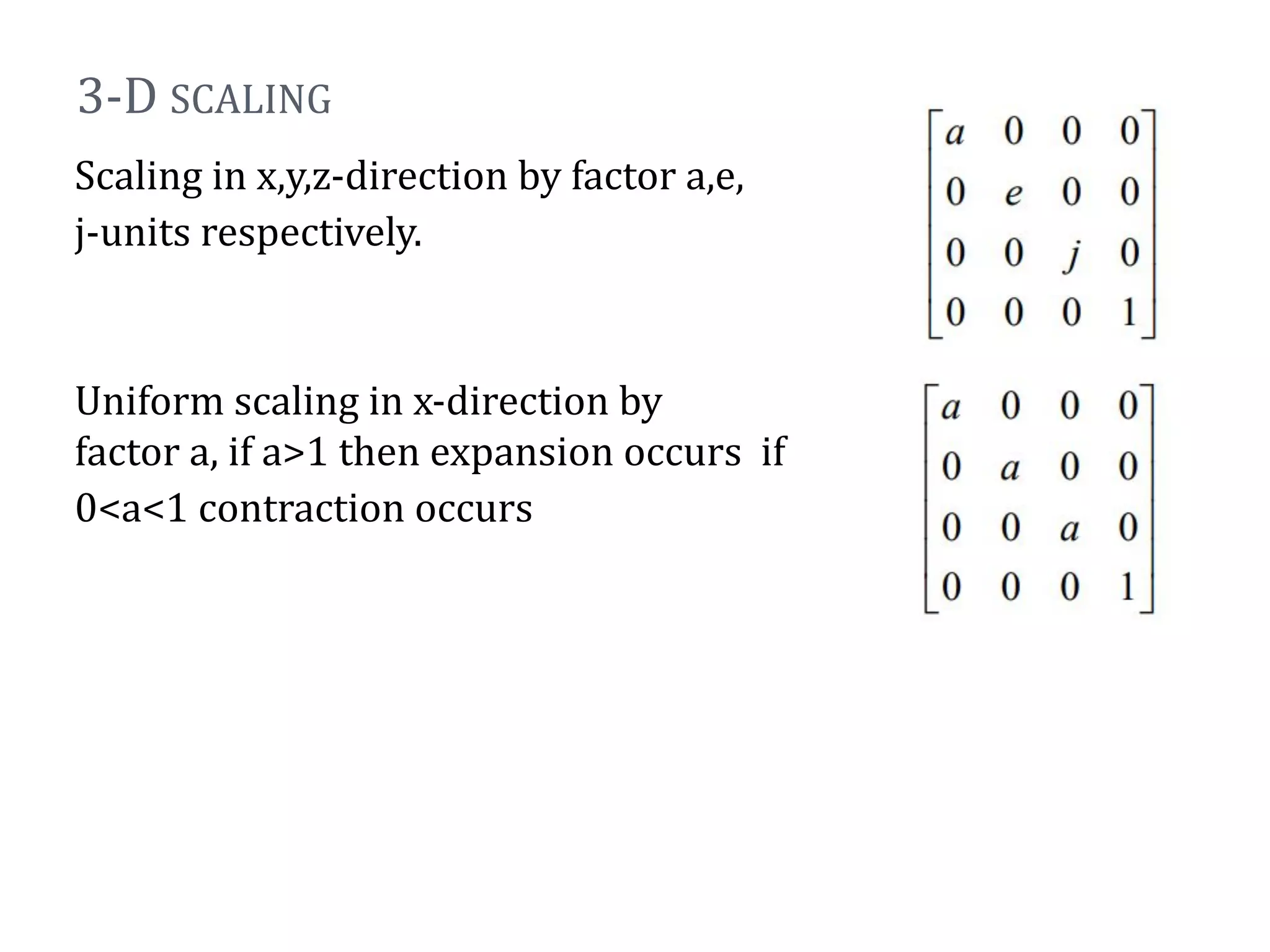
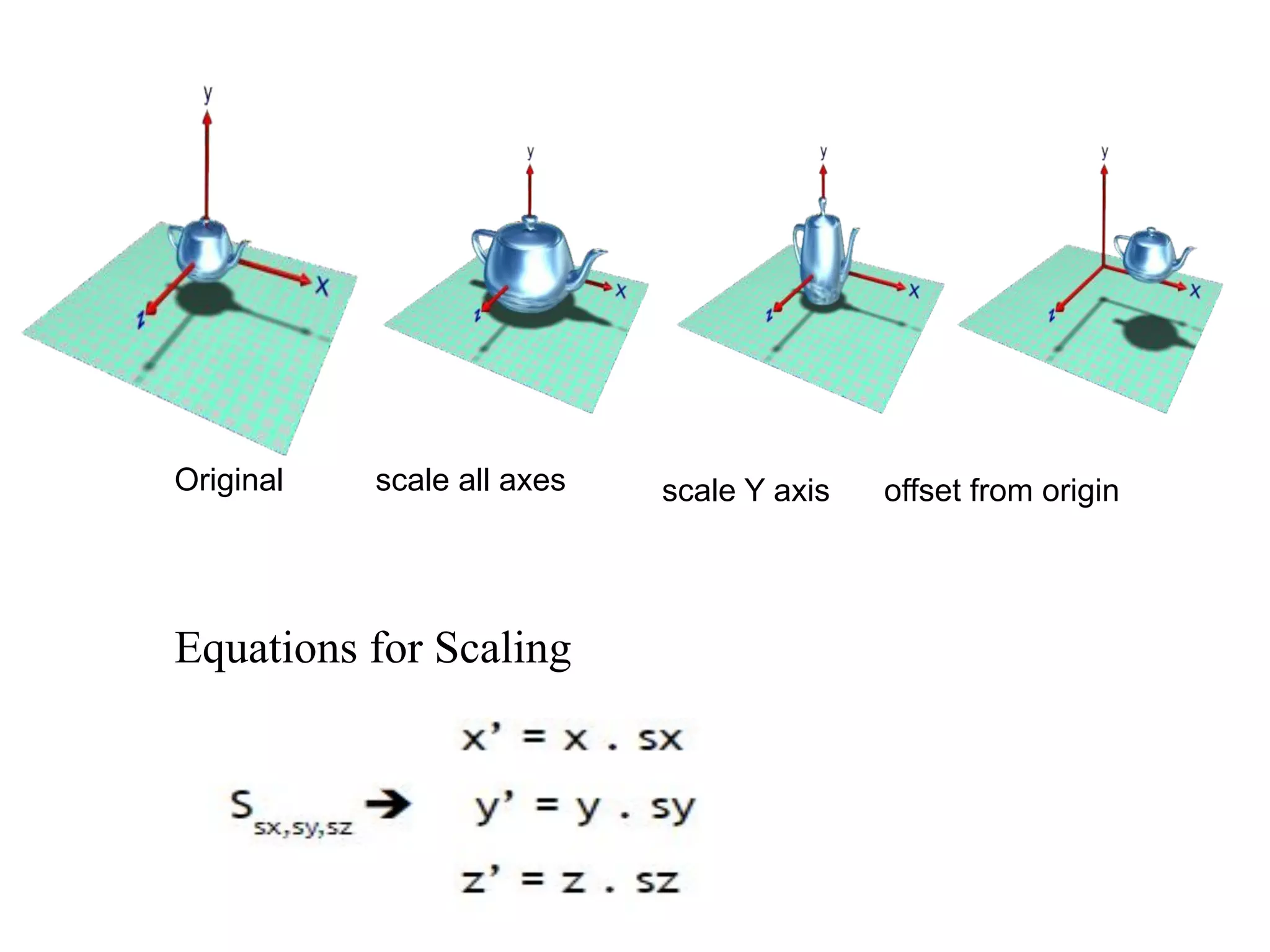
This document discusses various 3D transformations including translation, rotation, scaling, reflection, and shearing. It provides the transformation matrices for each type of 3D transformation. It also discusses combining multiple transformations through composite transformations by multiplying the matrices in sequence from right to left.