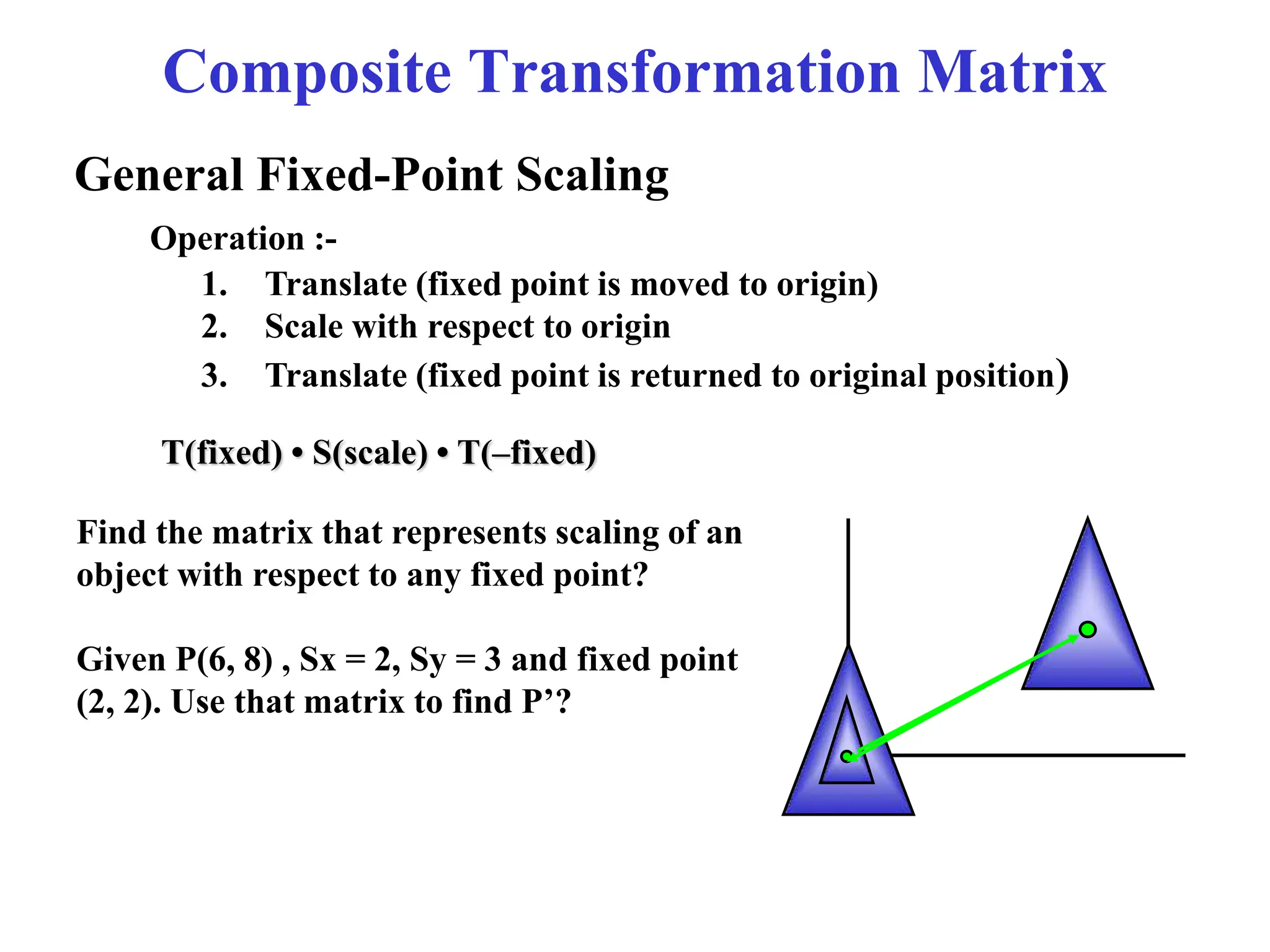
The document provides an overview of 2D transformations, including translations, rotations, and scalings, explaining their mathematical representations using matrices. It emphasizes the utility of matrix operations in efficiently combining transformations, along with the introduction of homogeneous coordinates for representation in a 3D context. Key details include the formation of transformation matrices and the significance of order in composite transformations.

![Translation
• A translation moves all points
in an object along the same
straight-line path to new
positions[ Linear
Displacement].
• The path is represented by a
vector, called the translation or
shift vector.
• We can write the components:
X’ = X + tx
Y’ = Y+ ty
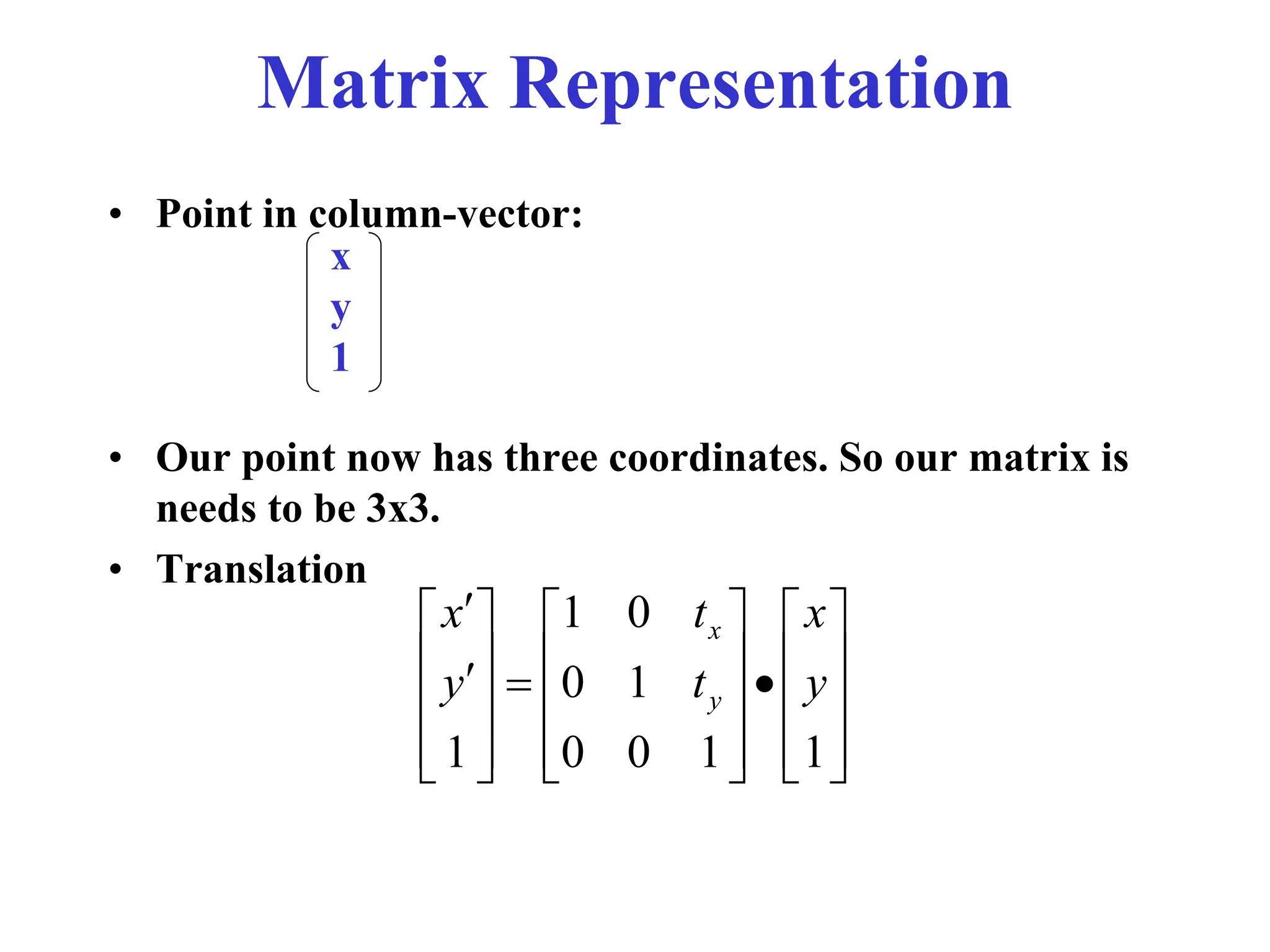
• or in matrix form:
P' = P + T
tx
ty
x’
y’
x
y
tx
ty
= +
(2, 2)
= 6
=4
?](https://image.slidesharecdn.com/2dtransformations-240709173721-81b02b79/75/Transformations-are-the-operations-applied-to-geometrical-description-of-an-object-to-change-its-position-orientation-or-size-are-called-geometric-transformations-5-2048.jpg)