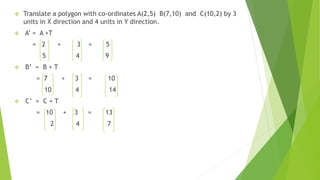
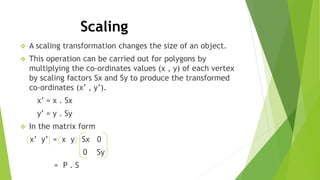
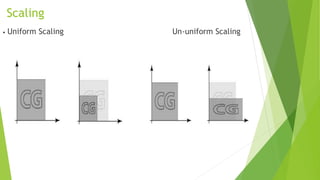
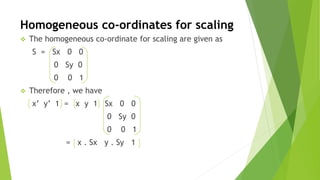
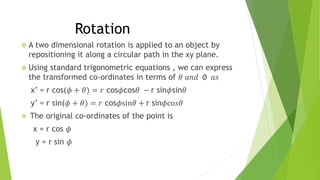
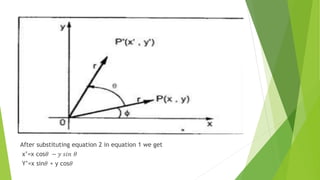
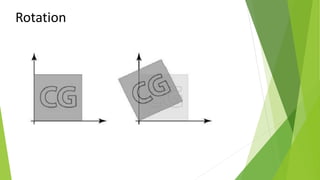
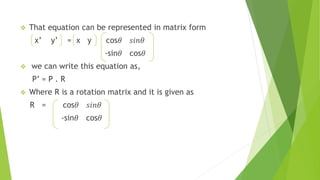
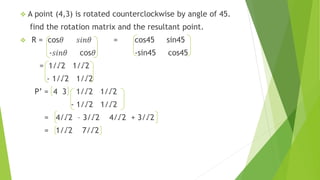
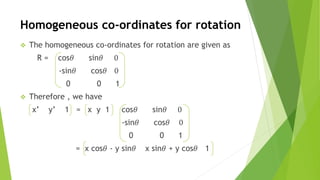
The document discusses 2D transformations in computer graphics, including translation, scaling, and rotation operations that alter an object's position, size, or orientation. It explains how to perform each transformation using mathematical formulas and matrix representations, with examples for translating and rotating points. The conclusion emphasizes the importance of transformations for manipulating and displaying modified objects efficiently.























































































![[DSC Europe 25] Andrzej Kowalczyk - AI - how to start small and grow in the f...](https://cdn.slidesharecdn.com/ss_thumbnails/oy1zmo94qv6vpcqjvno2-andrzej-kowalczyk-ai-how-to-start-small-and-grow-in-the-future-1-260119121559-cf093b23-thumbnail.jpg?width=640&height=640&fit=bounds)

