The document provides an overview of 2D and 3D geometric transformations including translation, rotation, scaling, and homogeneous coordinates. It then describes 2D translation, rotation, and scaling transformations through equations, matrix representations, and examples. Key points covered include:
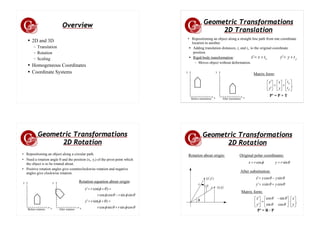
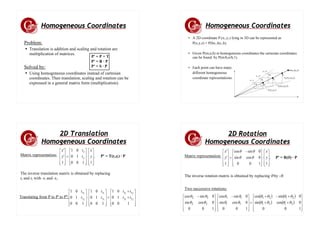
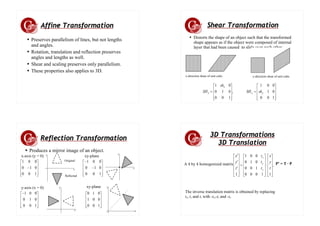
- Translating an object by adding translation distances tx and ty to the original coordinates
- Rotating an object using a rotation angle θ and pivot point coordinates
- Scaling an object by multiplying coordinates by scaling factors sx and sy
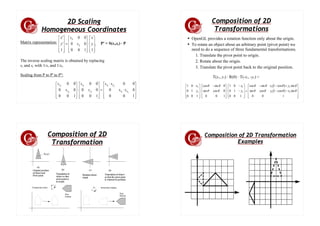
- Representing transformations using homogeneous coordinates and transformation matrices
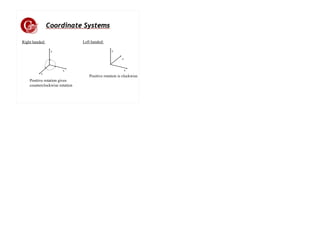
- Composing multiple transformations through matrix multiplication


![Geometric Transformation
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
1
0
0
0
1
0
0 33
32
31
23
22
21
13
12
11
22
21
12
11
z
y
x
y
x
t
r
r
r
t
r
r
r
t
r
r
r
or
t
r
r
t
r
r
A transformation matrix of the form: (translation and rotation)
is called special orthogonal.
It preserves angles and length.
The inverse is the transpose.
Each row vector in the matrix has 3 properties:
1. Each is a unit vector
2. Each is perpendicular to the other
3. The first and second vector will be rotated by R(θ)
to lie on the positive x and y axes, respectively.
Composition of 3D
Transformation
Initial position Final position
x
z
y
P1
P3
P2
x
z
y
P1
P3
P2
Two ways to achieve the transformation:
1. Compose the transformation T, Rx, Ry, Rz.
2. Using the properties of the orthogonal matrix.
Composition of 3D
Transformation
Done the same way as 2D composition.
1. Translate P1 to the origin
2. Rotate about the y-axis (P1,P2 lies in the (y,z) plane)
3. Rotate about the x-axis (P1,P2 lies on the z-axis)
4. Rotate about the z-axis (P1,P3 lies in the (y,z) plane)
The composite matrix will be
( ) ( ) ( ) )
,
,
(
90 1
1
1 z
y
x
T
R
R
R y
x
z −
−
−
⋅
−
⋅
⋅ θ
φ
α
Composition of 3D
Transformation
Rz will rotate into z-axis.
Create the rotation matrix by using cross product.
[ ]
2
1
2
1
3
2
1
P
P
P
P
r
r
r
R
T
z
z
z
z =
=
Rx will rotate into x-axis.
[ ]
2
1
3
1
2
1
3
1
3
2
1
P
P
P
P
P
P
P
P
r
r
r
R
T
x
x
x
x
×
×
=
=
Ry will rotate into y-axis.
[ ]
x
z
x
z
T
y
y
y
y
R
R
R
R
r
r
r
R
×
×
=
= 3
2
1
T
R
z
y
x
T
r
r
r
r
r
r
r
r
r
z
z
z
y
y
y
x
x
x
⋅
=
−
−
−
⋅
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
)
,
,
(
1
0
0
0
0
0
0
1
1
1
3
2
1
3
2
1
3
2
1
Composite
Matrix](https://image.slidesharecdn.com/2dtranslation-230712130527-ddb638e1/85/2D-Translation-pdf-7-320.jpg)