Downloaded 521 times
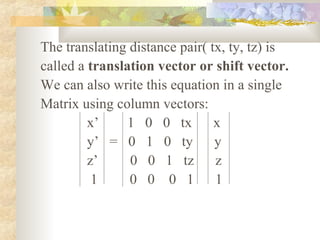
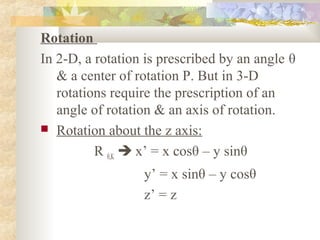
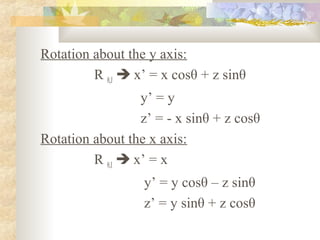
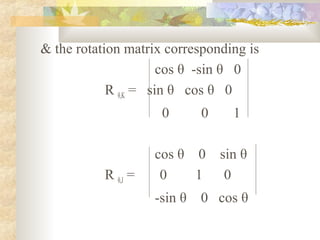
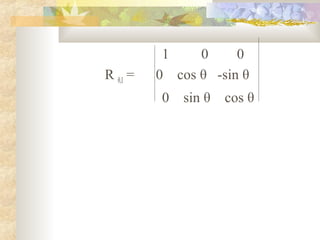
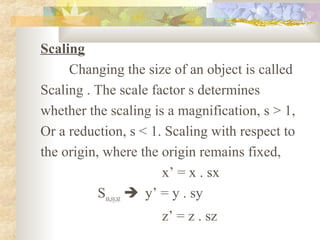
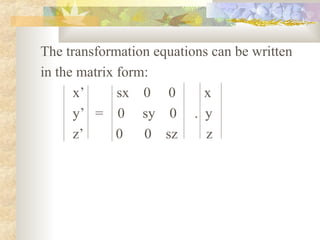
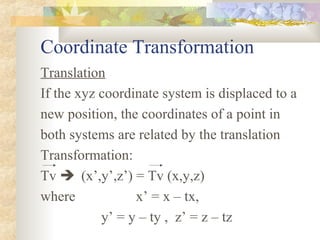
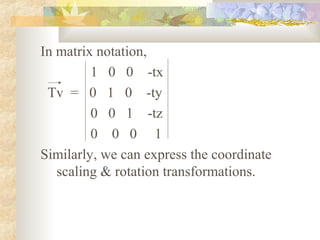
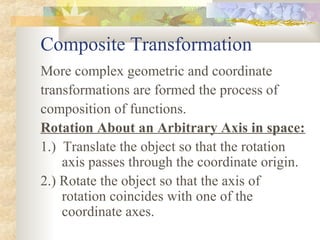
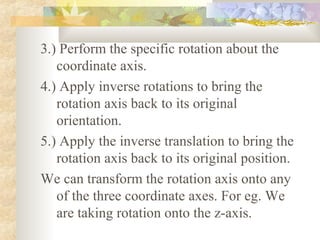
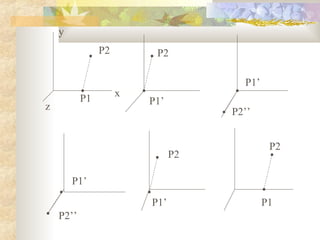

Geometric transformations include translation, rotation, and scaling. Translation moves every point of an object by adding a translation vector. Rotation rotates the object around an axis by a certain angle. Scaling enlarges or shrinks the object by a scale factor. More complex transformations can be achieved by combining these basic transformations through composition.