Downloaded 10 times







![• Ynew = Yold x Sy = 0 x 3 = 0
Thus, New coordinates of corner C after scaling = (6, 0).
For Coordinates D(0, 0)
Let the new coordinates of corner D after scaling = (Xnew, Ynew).
Applying the scaling equations, we have-
• Xnew = Xold x Sx = 0 x 2 = 0
• Ynew = Yold x Sy = 0 x 3 = 0
Thus, New coordinates of corner D after scaling = (0, 0).
Thus, New coordinates of the square after scaling = A (0, 9), B(6, 9), C(6, 0), D(0, 0).
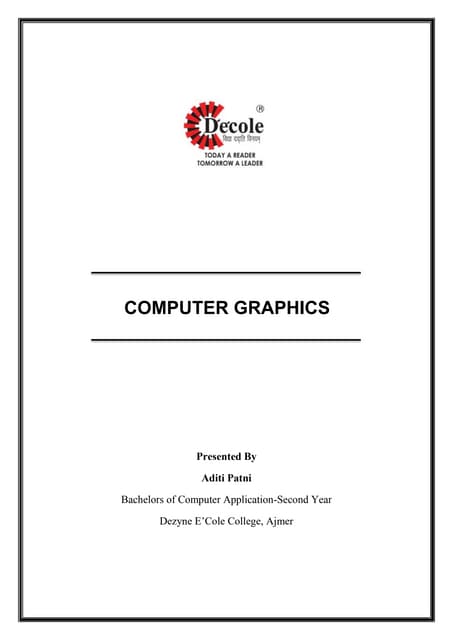
Derivation of scaling matrix based on arbitrary point
Step-01: Translate
tx = - Px, ty = - Py
[T1] = |
1 0 𝑡𝑥
0 1 𝑡𝑦
0 0 1
| = |
1 0 −𝑃𝑥
0 1 −𝑃𝑦
0 0 1
|
Step-02: Scaling about the origin
[S0] = |
𝑆𝑥 0 0
0 𝑆𝑦 0
0 0 1
|
Step-03: Back Translate
tx = Px, ty = Py
[T2] = |
1 0 𝑡𝑥
0 1 𝑡𝑦
0 0 1
| = |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
|](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-8-320.jpg)
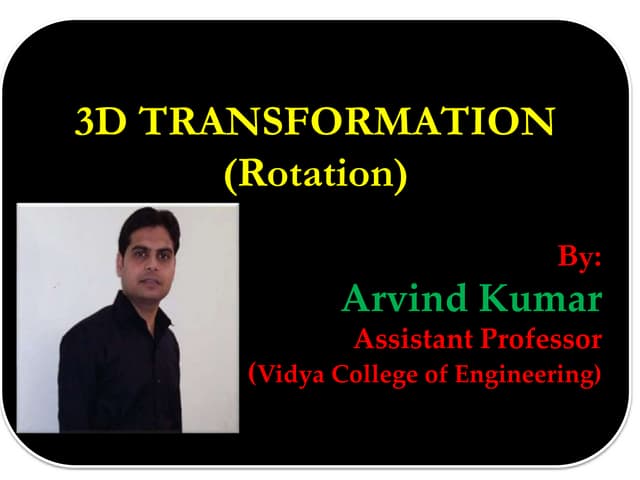
![Step-04:
Scaling matrix about arbitrary point
[Sp] = [T2] [S0] [T1]
= |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
| |
𝑆𝑥 0 0
0 𝑆𝑦 0
0 0 1
| |
1 0 −𝑃𝑥
0 1 −𝑃𝑦
0 0 1
|
= |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
| |
𝑆𝑥 0 −𝑆𝑥. 𝑃𝑥
0 𝑆𝑦 −𝑆𝑦. 𝑃𝑦
0 0 1
|
= |
𝑆𝑥 0 −𝑆𝑥. 𝑃𝑥 + 𝑃𝑥
0 𝑆𝑦 −𝑆𝑦. 𝑃𝑦 + 𝑃𝑦
0 0 1
|
=|
𝑆𝑥 0 𝑃𝑥(1 − 𝑆𝑥)
0 𝑆𝑦 𝑃𝑦(1 − 𝑆𝑦)
0 0 1
|
Problem:
Magnify the triangle with vertices A(0, 0), B(1, -1) and C(4, 2) to twice its size by keeping the
vertex C(4, 2) fixed.
Solution:
Here, scaling factor along X-axis, Sx= 2 and scaling factor along Y-axis, Sy=2 and the arbitrary
point Px=4 and Py=2
We know that,
[
𝑥′
𝑦′
1
] = [
𝑆𝑥 0 𝑃𝑥(1 − 𝑆𝑥)
0 𝑆𝑦 𝑃𝑦(1 − 𝑆𝑦)
0 0 1
] [
𝑥
𝑦
1
] (1)
For vertex A(0, 0) the equation (1) becomes
[
𝑥′
𝑦′
1
] = [
2 0 4(1 − 2)
0 2 2(1 − 2)
0 0 1
] [
0
0
1
]
= [
2 0 −4
0 2 −2
0 0 1
] [
0
0
1
]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-9-320.jpg)
![= [
0 + 0 − 4
0 + 0 − 2
0 + 0 + 1
]
= [
−4
−2
1
]
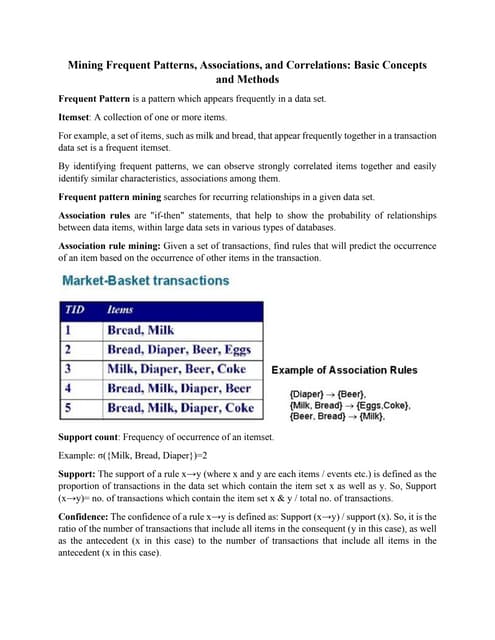
Therefore A’ = (x’, y’) = (-4, -2)
For vertex B(1, -1) the equation (1) becomes
[
𝑥′
𝑦′
1
] = [
2 0 4(1 − 2)
0 2 2(1 − 2)
0 0 1
] [
1
−1
1
]
= [
2 0 −4
0 2 −2
0 0 1
] [
1
−1
1
]
= [
2 − 0 − 4
0 − 2 − 2
0 + 0 + 1
]
= [
−2
−4
1
]
Therefore B’ = (x’, y’) = (-2, -4)
2D Rotation in Computer Graphics
In Computer graphics,
2D Rotation is a process of rotating an object with respect to an angle in a two dimensional plane
Consider a point object O has to be rotated from one angle to another in a 2D plane.
Let-
• Initial coordinates of the object O = (Xold, Yold)
• Initial angle of the object O with respect to origin = Φ
• Rotation angle = θ
• New coordinates of the object O after rotation = (Xnew, Ynew)](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-10-320.jpg)



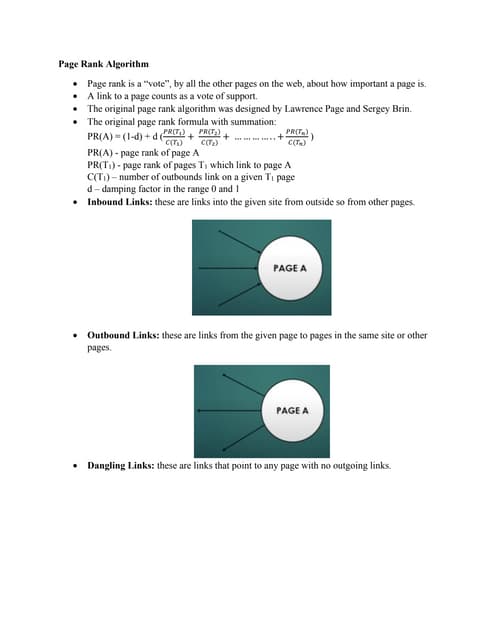
![Derivation of rotation matrix based on arbitrary point
Step-01: Translate
tx = - Px, ty = - Py
[T1] = |
1 0 𝑡𝑥
0 1 𝑡𝑦
0 0 1
| = |
1 0 −𝑃𝑥
0 1 −𝑃𝑦
0 0 1
|
Step-02: Rotate about origin
[R0] = |
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 0
0 0 1
|
Step-03: Back Translate
tx = Px, ty = Py
[T2] = |
1 0 𝑡𝑥
0 1 𝑡𝑦
0 0 1
| = |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
|
Step-04: Rotation matrix about arbitrary point
[Tp] = [T2] [R0] [T1]
= |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
| |
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 0
0 0 1
| |
1 0 −𝑃𝑥
0 1 −𝑃𝑦
0 0 1
|
= |
1 0 𝑃𝑥
0 1 𝑃𝑦
0 0 1
| |
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 −𝑃𝑥𝑐𝑜𝑠𝜃 + 𝑃𝑦𝑠𝑖𝑛𝜃
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 −𝑃𝑥𝑠𝑖𝑛𝜃 − 𝑃𝑦𝑐𝑜𝑠𝜃
0 0 1
|
= |
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 −𝑃𝑥𝑐𝑜𝑠𝜃 + 𝑃𝑦𝑠𝑖𝑛𝜃 + 𝑃𝑥
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 −𝑃𝑥𝑠𝑖𝑛𝜃 − 𝑃𝑦𝑐𝑜𝑠𝜃 + 𝑃𝑦
0 0 1
|
= |
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 𝑃𝑥(1 − 𝑐𝑜𝑠𝜃) + 𝑃𝑦𝑠𝑖𝑛𝜃
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 𝑃𝑦(1 − 𝑐𝑜𝑠𝜃 − 𝑃𝑥𝑠𝑖𝑛𝜃
0 0 1
|](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-14-320.jpg)
![Problem
Perform a 45 degree rotation of triangle A(0, 0), B (1, 1) and C(5, 2)
i. About the origin
ii. About P(-1, -1)
Solution
i. We know that,
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 0
0 0 1
] [
𝑥
𝑦
1
] (2)
For vertex A(0, 0) the equation (2) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
0
𝑠𝑖𝑛450
𝑐𝑜𝑠450
0
0 0 1
] [
0
0
1
]
= [
1
√2
−
1
√2
0
1
√2
1
√2
0
0 0 1
] [
0
0
1
]
= [
0 − 0 + 0
0 + 0 + 0
0 + 0 + 1
]
= [
0
0
1
]
Therefore A’ = (x’, y’) = (0, 0)
For vertex B(1, 1) the equation (2) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
0
𝑠𝑖𝑛450
𝑐𝑜𝑠450
0
0 0 1
] [
1
1
1
]
= [
1
√2
−
1
√2
0
1
√2
1
√2
0
0 0 1
] [
1
1
1
]
= [
1
√2
−
1
√2
+ 0
1
√2
+
1
√2
+ 0
0 + 0 + 1
]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-15-320.jpg)
![= [
0
2
√2
1
]
=[
0
√2
1
]
Therefore B’ = (x’, y’) = (0, √2)
For vertex C(5, 2) the equation (2) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
0
𝑠𝑖𝑛450
𝑐𝑜𝑠450
0
0 0 1
] [
5
2
1
]
= [
1
√2
−
1
√2
0
1
√2
1
√2
0
0 0 1
] [
5
2
1
]
= [
5
√2
−
2
√2
+ 0
5
√2
+
2
√2
+ 0
0 + 0 + 1
]
= [
3
√2
7
√2
1
]
=
[
3√2
2
7√2
2
1 ]
Therefore C’ = (x’, y’) = (
3√2
2
,
7√2
2
)
ii. We know that,
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 𝑃𝑥(1 − 𝑐𝑜𝑠𝜃) + 𝑃𝑦𝑠𝑖𝑛𝜃
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 𝑃𝑦(1 − 𝑐𝑜𝑠𝜃) − 𝑃𝑥𝑠𝑖𝑛𝜃
0 0 1
] [
𝑥
𝑦
1
] (3)
For vertex A(0, 0) the equation (3) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
−1(1 − 𝑐𝑜𝑠450) + (−1)𝑠𝑖𝑛450
𝑠𝑖𝑛450
𝑐𝑜𝑠450
−1(1 − 𝑐𝑜𝑠450) − (−1)𝑠𝑖𝑛450
0 0 1
] [
0
0
1
]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-16-320.jpg)
![=[
1
√2
−
1
√2
−1 (1 −
1
√2
) + (−1)
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) − (−1)
1
√2
0 0 1
] [
0
0
1
]
=[
1
√2
−
1
√2
−1 (1 −
1
√2
) −
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) +
1
√2
0 0 1
] [
0
0
1
]
=
[
1
√2
−
1
√2
− (
√2−1
√2
) −
1
√2
1
√2
1
√2
− (
√2−1
√2
) +
1
√2
0 0 1 ]
[
0
0
1
]
=
[
1
√2
−
1
√2
−√2+1−1
√2
1
√2
1
√2
−√2+1+1
√2
0 0 1 ]
[
0
0
1
]
=
[
1
√2
−
1
√2
−√2
√2
1
√2
1
√2
−√2+2
√2
0 0 1 ]
[
0
0
1
]
=[
1
√2
−
1
√2
−√2
√2
1
√2
1
√2
√2 − 1
0 0 1
] [
0
0
1
]
=[
0 − 0 +
−√2
√2
0 + 0 + (√2 − 1)
0 + 0 + 1
]
=[
−1
√2 − 1
1
]
Therefore A’ = (x’, y’) = (-1, √2 − 1)
For vertex B(1, 1) the equation (3) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
−1(1 − 𝑐𝑜𝑠450) + (−1)𝑠𝑖𝑛450
𝑠𝑖𝑛450
𝑐𝑜𝑠450
−1(1 − 𝑐𝑜𝑠450) − (−1)𝑠𝑖𝑛450
0 0 1
] [
1
1
1
]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-17-320.jpg)
![=[
1
√2
−
1
√2
−1 (1 −
1
√2
) + (−1)
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) − (−1)
1
√2
0 0 1
] [
1
1
1
]
=[
1
√2
−
1
√2
−1 (1 −
1
√2
) −
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) +
1
√2
0 0 1
] [
1
1
1
]
=
[
1
√2
−
1
√2
− (
√2−1
√2
) −
1
√2
1
√2
1
√2
− (
√2−1
√2
) +
1
√2
0 0 1 ]
[
1
1
1
]
=
[
1
√2
−
1
√2
−√2+1−1
√2
1
√2
1
√2
−√2+1+1
√2
0 0 1 ]
[
1
1
1
]
=
[
1
√2
−
1
√2
−√2
√2
1
√2
1
√2
−√2+2
√2
0 0 1 ]
[
1
1
1
]
=[
1
√2
−
1
√2
−1
1
√2
1
√2
√2 − 1
0 0 1
] [
1
1
1
]
=[
1
√2
−
1
√2
− 1
1
√2
+
1
√2
+ (√2 − 1)
0 + 0 + 1
]
=
[
1−1−√2
√2
1+1+√2(√2−1)
√2
1 ]
=
[
−√2
√2
2+(√2)2−√2
√2
1 ]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-18-320.jpg)
![=[
−1
2+2−√2
√2
1
]
=[
−1
4−√2
√2
1
]
=[
−1
2√2√2−√2
√2
1
]
=[
−1
√2(2√2−1)
√2
1
]
=[
−1
2√2 − 1
1
]
Therefore B’ = (x’, y’) = (-1, 2√2 − 1)
For vertex C(5, 2) the equation (3) becomes
[
𝑥′
𝑦′
1
] = [
𝑐𝑜𝑠450
−𝑠𝑖𝑛450
−1(1 − 𝑐𝑜𝑠450) + (−1)𝑠𝑖𝑛450
𝑠𝑖𝑛450
𝑐𝑜𝑠450
−1(1 − 𝑐𝑜𝑠450) − (−1)𝑠𝑖𝑛450
0 0 1
] [
5
2
1
]
=[
1
√2
−
1
√2
−1 (1 −
1
√2
) + (−1)
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) − (−1)
1
√2
0 0 1
] [
5
2
1
]
=[
1
√2
−
1
√2
−1 (1 −
1
√2
) −
1
√2
1
√2
1
√2
−1 (1 −
1
√2
) +
1
√2
0 0 1
] [
5
2
1
]
=
[
1
√2
−
1
√2
− (
√2−1
√2
) −
1
√2
1
√2
1
√2
− (
√2−1
√2
) +
1
√2
0 0 1 ]
[
5
2
1
]
=
[
1
√2
−
1
√2
−√2+1−1
√2
1
√2
1
√2
−√2+1+1
√2
0 0 1 ]
[
5
2
1
]](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-19-320.jpg)
![=
[
1
√2
−
1
√2
−√2
√2
1
√2
1
√2
−√2+2
√2
0 0 1 ]
[
5
2
1
]
=[
1
√2
−
1
√2
−1
1
√2
1
√2
√2 − 1
0 0 1
] [
5
2
1
]
=[
5
√2
−
2
√2
− 1
5
√2
+
2
√2
+ (√2 − 1)
1
]
=
[
5−2−√2
√2
5+2+√2(√2−1)
√2
1 ]
=
[
3−√2
√2
7+(√2)2−√2
√2
1 ]
=
[
3−√2
√2
9−√2
√2
1 ]
=
[
3√2−2
2
9√2−2
2
1 ]
=
[
3√2−2
2
9√2−2
2
1 ]
=
[
3√2
2
− 1
9√2
2
− 1
1 ]
Therefore C’ = (x’, y’) = (
3√2
2
− 1,
9√2
2
− 1)](https://image.slidesharecdn.com/2dtransformatiincomputergraphics-211026180432/85/2D-Transformation-in-Computer-Graphics-20-320.jpg)








2D transformations are important operations in computer graphics that allow modifying the position, size, and orientation of objects in a 2D plane. There are several types of 2D transformations including translation, rotation, scaling, and more. Transformations are represented using matrix math for efficient application of sequential transformations. Key techniques include homogeneous coordinates to allow different types of transformations to be combined into a single matrix operation.